le robot parallèle est ainsi appelé parce qu'il n'est pas constitué d'une véritable chaîne de cinématique. les joints ne sont pas en série, l'un derrière l'autre, mais en parallèle.
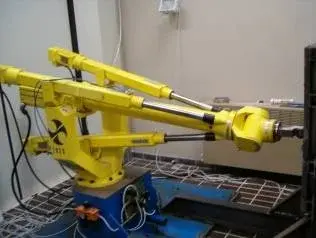
le flexpicker blanc a quatre articulations rotatives. les trois premiers en série déplacent trois leviers et permettent le positionnement du point final. le quatrième, au moyen d'un joint homokinétique permet la rotation de l'outil autour d'un axe vertical. le robot jaune a plutôt les trois joints parallèles remplacés par des disques linéaires (mais dans le concept rien ne change), et à la fin est monté un poignet sphérique, ce qui fait le système à six gdm.
mais on va parler du poignet. le nom d'une chaîne cinématographique est donné exclusivement par le type et le positionnement des trois premières articulations. tout ce qui vient plus tard fait partie du poignet. dans ce poste et dans les postes précédents j'ai fait une petite exception pour les robots à quatre gdm, parce que je n'ai pas l'impression de définir le seul quatrième axe de rotation.
par conséquent, le robot parallèle est habituellement utilisé pour les tâches de pick&place. il est un peu plus complexe que les déchets, il n'a pas de rendement dans des directions préférentielles, il peut avoir un espace de travail plus grand qu'un déchet sans trop peser.
les principales caractéristiques des robots parallèles sont la grande rigidité et la grande vitesse. la rigidité est donnée par la structure, les bras formant des anneaux structuraux fermés, tandis que la vitesse élevée est donnée par le fait que, étant la structure cinématographique parallèle, chaque joint doit déplacer un bras. dans toutes les chaînes cinématographiques de série, cependant, chaque joint doit déplacer tous les bras, moteurs et engrenages des joints qui le suivent.
ce type de robot est largement utilisé dans les usines de mise en conserve, en particulier dans les aliments.
dans ces vidéos vous pouvez voir quelque chose:
http://www.youtube.com/watch?v=0-kpv-zocky&feature=related
http://www.youtube.com/watch?v=adlmxmxlry8
http://www.youtube.com/watch?v=vxz5n2tnqou&feature=related ")
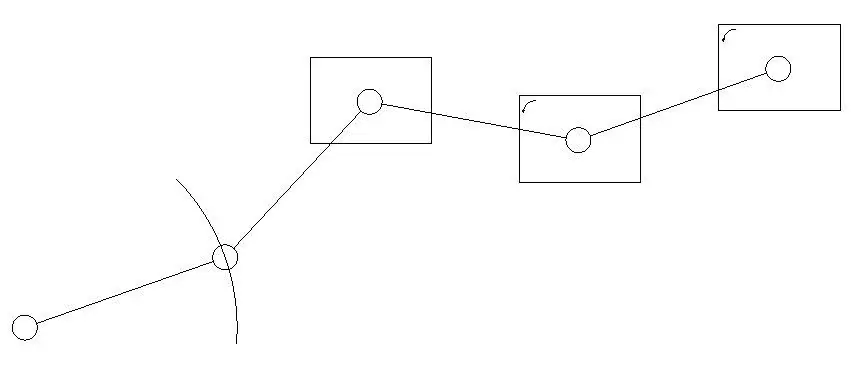
en particulier le soi-disant "tracking" du matériel est noté. une caméra observe la disposition chaotique des pièces sur la bande, prend une photo dans un certain moment de temps. la tâche est prévue en termes de:
- position et orientation de la pièce à prendre
- la position et l'orientation de l'endroit où le déposer (par exemple pour séparer les croissants de crème de ceux à la confiture)
- faisabilité de l'opération (souvent plus de robots sont mis en ligne. si à un moment donné il y a trop de pièces à traiter et que le premier robot sait ne pas le faire à temps, faites rapport à ceux qui le quitteront, etc.)
à ce stade, le "compito" est programmé comme si la bande était encore. est passé au contrôleur la structure de la tâche et la vitesse de la bande, et cela effectuera la tâche, ajoutant la vitesse de la bande à celle de la tâche originale. une poursuite naturelle (suivi) de la bande, qui est complètement transparente pour l'opérateur. vous remarquez particulièrement dans la première des vidéos ci-dessus.
le potentiel de ce robot est grand, bien que ses applications soient assez limitées. en particulier vous pouvez voir la délicatesse avec laquelle les brioches sont manipulées, et plutôt la vitesse des retours vides (voir l'étendue de la course). les biscuits sont généralement manipulés avec beaucoup moins de chou, les chocolats sont plutôt une voie intermédiaire.
en regardant une plante de boxe au chocolat (sur le tube je n'en ai trouvé aucune importante) vous remarquez une chose intéressante. la vitesse est assez soutenue, tout d'un coup les accélérations tombent pour manipuler certaines pièces, sans aucune raison apparente. ce sont les chocolats à liqueur, si les accélérations étaient trop élevées, la liqueur brûlerait le chocolat et s'échapperait. de plus, une accélération verticale doit correspondre à une prise plus énergique, sinon la pièce glisse, et les chocolats à la liqueur ne peuvent pas lui permettre.
un autre type de robot parallèle est le soi-disant "esapode", à ne pas confondre avec d'autres hexapodes, ceux qui marchent avec six jambes. un système de six gdm avec tous les actionneurs linéaires et le tout en parallèle. je crois que c'est la seule structure cinématographique qui, bien que n'ayant pas de pouls, peut accomplir une tâche à six degrés de liberté.
avec son espace de travail extrêmement réduit, ce manipulateur extrêmement rigide n'a pas de tâches de pick&place, où 4 gdl sont plus que suffisants. est utilisé avant tout, dans la forme de réalisation appelée plate-forme stewart, comme positionneur. en fait a la caractéristique de pouvoir placer un objet dans l'espace à six gdl avec une très haute précision. est utilisé pour l'alignement de l'optique, pour les opérations microchirurgicales, pour les opérations d'inspection, pour conditionner la courbure des miroirs du télescope, pour l'alignement des réflecteurs dans les radiotélescopes, etc.