il est possible de faire le contraire, c'est-à-dire d'une séquence 2d pour obtenir de créer un environnement 3d.
où seulement quelques points forts ou un nuage de points sont désignés par l'environnement 3d.
les programmes de photogrammétrie modernes essaient d'obtenir autant d'informations que possible d'une séquence de photos pour retourner un nuage de points
Mais ils sont extrêmement exigeants en termes de qualité des images à traiter et pour obtenir un résultat acceptable, ils prennent beaucoup de temps pour retourner notre nuage de points.
les programmes traditionnels de matchmoving ne retournent aucun nuage. seulement des points saillants qui fonctionnent pour identifier dans l'environnement 3d.
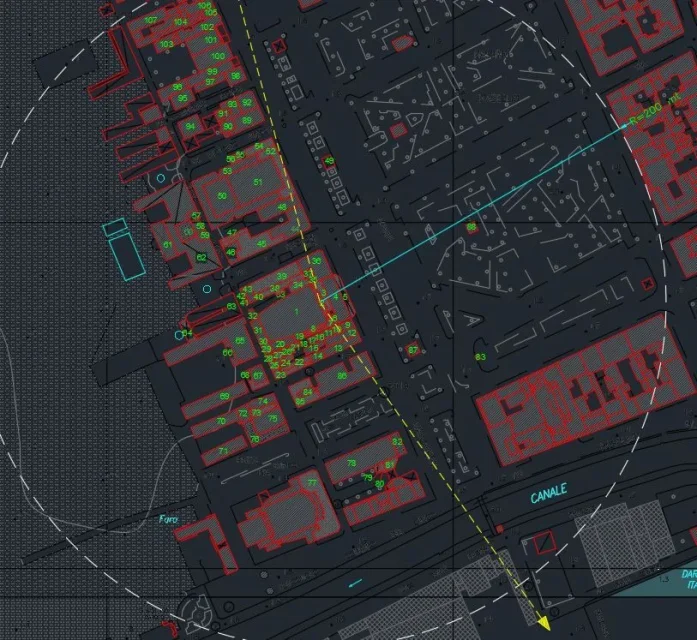
Par exemple, à partir de cette vidéo survolo réalisée avec Google Earth, j'ai reconstruit le maillage 3d qui identifie la zone d'intervention, ainsi que sa tendance altimétrique. J'ai utilisé des synthés pour le match. parce que je n'avais pas besoin d'avoir un nuage entier de points, mais seulement ces points par rapport à l'avion asphalté qui me permettrait de dessiner l'altimétrique plano du chemin.
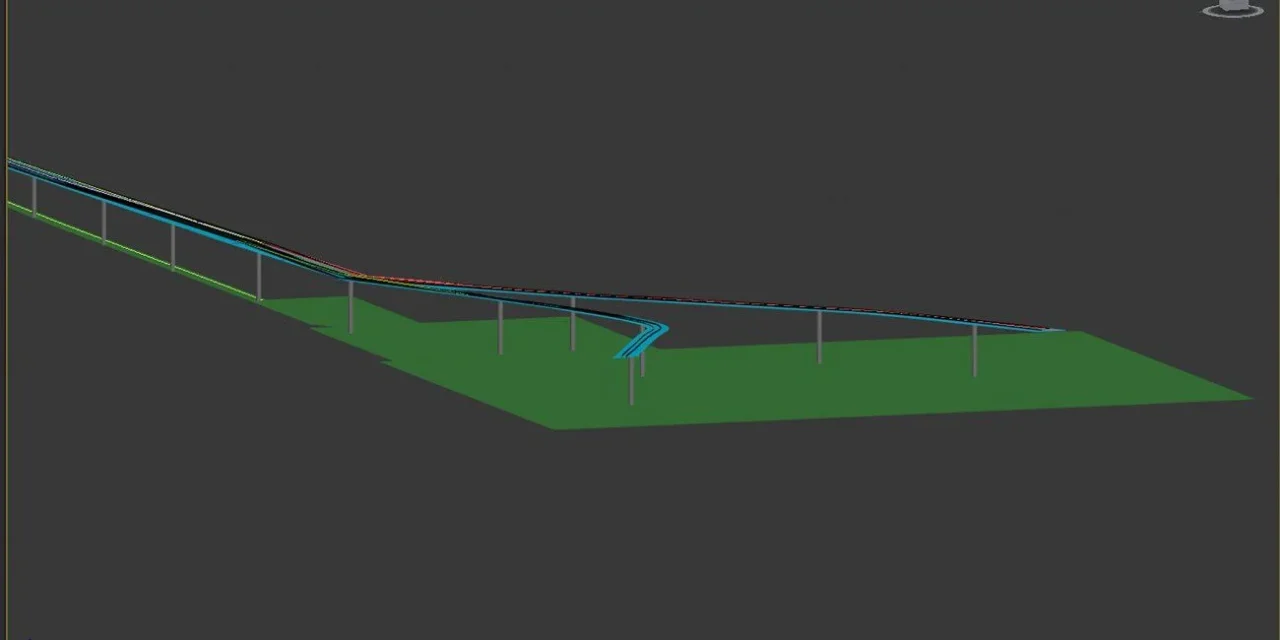
maillage 3d sur lequel dessiner des solides de conception, maillage 3d obtenu à partir d'une séquence de cadres 2d
qui en bleu est le maillage 3d inséré dans la vidéo 2d.
Il n'est pas possible de faire une telle chose avec un programme de photogrammétrie. un logiciel pour le machmoving, ou le suivi (dans ce cas manuel) des points qui nous intéressent. dans le cas particulier des points visibles dans les cadres et traçables. points qui peuvent être des taches d'huile sur l'asphalte, les bords latéraux, etc. Enfin, ces points sont connectés et le maillage est créé.
vous pourriez également faire pour les murs des bâtiments pour reconstruire la hauteur approximative, mais il est nécessaire du logiciel qui permet le suivi des points