Taipan95
Guest
Bonjour.
J'essaie d'améliorer mes connaissances sur les moteurs électriques + réducteur (+ onduleur, dans ce cas).
Je voudrais essayer de dimensionner un moteur asynchrone en trois phases, pour être ajusté avec un onduleur, essayer de « copier » une étude de cas que j'ai vue lors d'un cours d'entraînement mais où elle commence avec le système déjà dimensionné et ensuite se concentrer sur d'autres aspects (en particulier, sur les forces de réaction sur les roulements de la poignée).
le système est une poignée biella, avec la biella qui est connectée à une charge fixe de 20kg.
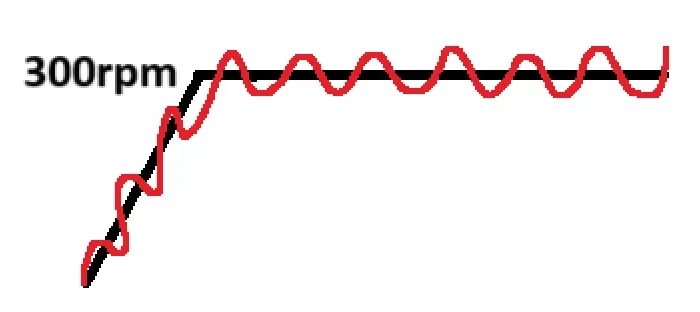
la manivelle doit prendre à la vitesse du régime (300 tr/min) après 2,5s, avec une rampe à plaisir (je considérais une rampe linéaire de 0s à 2,5s pour la simplicité).
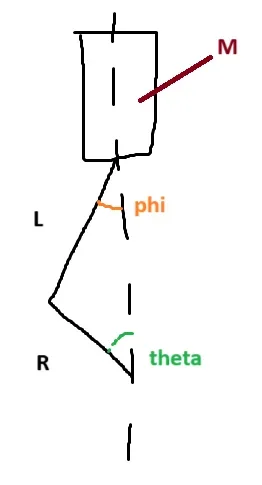
la manivelle est de 175mm, la bielle est de 519mm.
Nous admettons que ce sont toutes les données de départ.
Je vous dis pour l'exhaustivité que dans l'étude de cas est également inséré un moteur entre le vilebrequin et le moteur asynchrone, avec un rapport environ 3. Mais je suppose que ça vient plus tard.
Pour pouvoir choisir le moteur asynchrone en trois phases, je suppose que je dois calculer le profil de couple nécessaire pour déplacer ce système avec le moment et les vitesses souhaités. Cela devrait au moins me donner un ordre de grandeur sur la taille du moteur à utiliser. Après cela, je pense, ils devraient suivre les considérations sur l'inverseur et le réducteur.
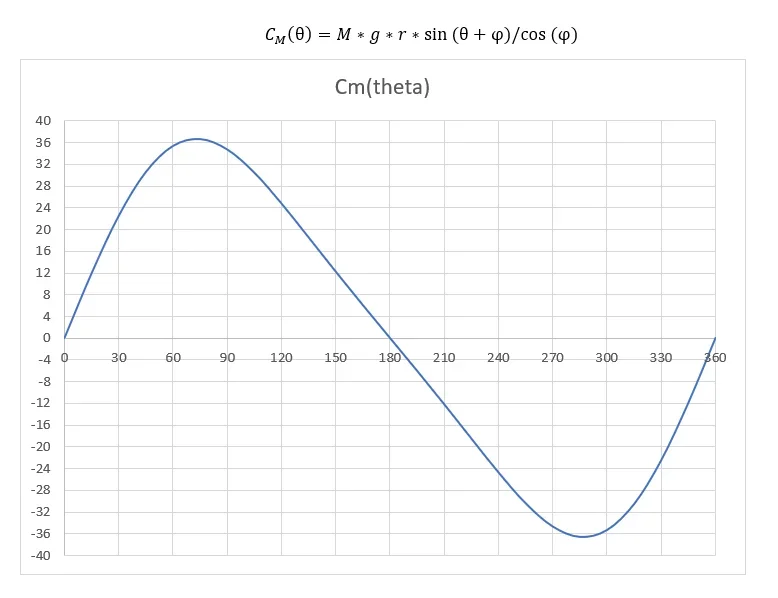
le problème est que dans ce cas j'ai une charge sinusoïdale, parce que la masse de 20kg va se déplacer de mouvement alternatif verticalement après le vélo de la biella-manovella.
J'ai essayé de calculer le profil de couple nécessaire à 300 tr/min, pour une rotation de manivelle, et je l'attache avec une boîte montrant le système. Mais je ne pense pas qu'il soit correct, parce qu'il ne tient pas compte de la présence de l'onduleur et qu'il ne se fait que pour la vitesse du régime sans considérer le transitaire.
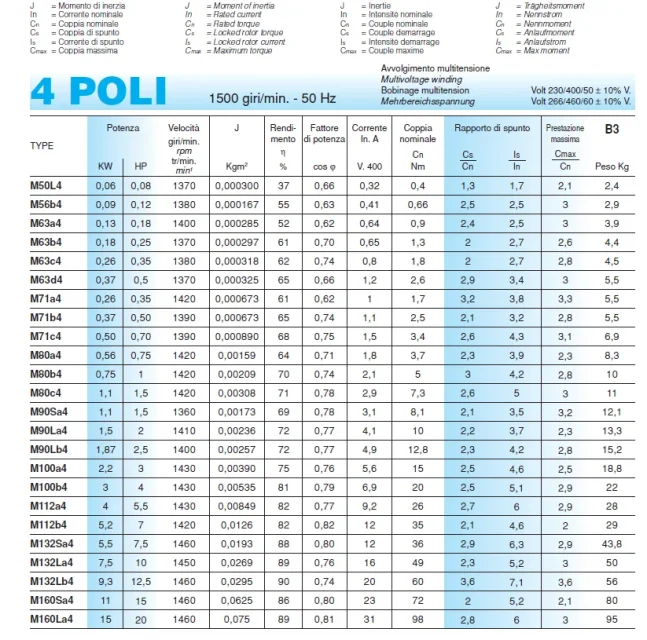
Je ne sais pas vraiment par où commencer, j'aimerais que quelqu'un, avec un peu de patience, puisse me conduire à comprendre comment tailler tout... J'ai réussi à trouver les catalogues de moteurs et la boîte de vitesses utilisés dans l'étude de cas, je les joigne aussi.
le moteur choisi est: m90sa4
le réducteur choisi est: 411a une étape 38nm
merci à tous ceux qui veulent contribuer
J'essaie d'améliorer mes connaissances sur les moteurs électriques + réducteur (+ onduleur, dans ce cas).
Je voudrais essayer de dimensionner un moteur asynchrone en trois phases, pour être ajusté avec un onduleur, essayer de « copier » une étude de cas que j'ai vue lors d'un cours d'entraînement mais où elle commence avec le système déjà dimensionné et ensuite se concentrer sur d'autres aspects (en particulier, sur les forces de réaction sur les roulements de la poignée).
le système est une poignée biella, avec la biella qui est connectée à une charge fixe de 20kg.
la manivelle doit prendre à la vitesse du régime (300 tr/min) après 2,5s, avec une rampe à plaisir (je considérais une rampe linéaire de 0s à 2,5s pour la simplicité).
la manivelle est de 175mm, la bielle est de 519mm.
Nous admettons que ce sont toutes les données de départ.
Je vous dis pour l'exhaustivité que dans l'étude de cas est également inséré un moteur entre le vilebrequin et le moteur asynchrone, avec un rapport environ 3. Mais je suppose que ça vient plus tard.
Pour pouvoir choisir le moteur asynchrone en trois phases, je suppose que je dois calculer le profil de couple nécessaire pour déplacer ce système avec le moment et les vitesses souhaités. Cela devrait au moins me donner un ordre de grandeur sur la taille du moteur à utiliser. Après cela, je pense, ils devraient suivre les considérations sur l'inverseur et le réducteur.
le problème est que dans ce cas j'ai une charge sinusoïdale, parce que la masse de 20kg va se déplacer de mouvement alternatif verticalement après le vélo de la biella-manovella.
J'ai essayé de calculer le profil de couple nécessaire à 300 tr/min, pour une rotation de manivelle, et je l'attache avec une boîte montrant le système. Mais je ne pense pas qu'il soit correct, parce qu'il ne tient pas compte de la présence de l'onduleur et qu'il ne se fait que pour la vitesse du régime sans considérer le transitaire.
Je ne sais pas vraiment par où commencer, j'aimerais que quelqu'un, avec un peu de patience, puisse me conduire à comprendre comment tailler tout... J'ai réussi à trouver les catalogues de moteurs et la boîte de vitesses utilisés dans l'étude de cas, je les joigne aussi.
le moteur choisi est: m90sa4
le réducteur choisi est: 411a une étape 38nm
merci à tous ceux qui veulent contribuer