redalex81
Guest
salut les gars... je regarde sur le filet depuis quelques jours des charnières mécaniques un peu particulières mais je n'hésite pas à trouver quelque chose de spécifique. . . .
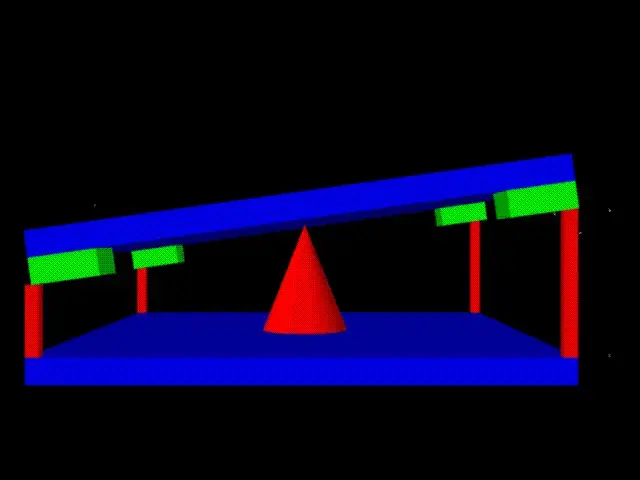
mon problème est de trouver une charnière qui dans l'espace ne permet que deux degrés de liberté, interdisant la rotation le long de l'axe perpendiculaire au sol, tout en permettant en pratique la rotation le long des deux axes restants.
je ne sais pas si j'ai été clair, mais je dois construire une plate-forme mobile motorisée qui oscille dans une direction antéro-postérieure et moyenne-latérale. . . .
merci à tous pour votre aide.. .
mon problème est de trouver une charnière qui dans l'espace ne permet que deux degrés de liberté, interdisant la rotation le long de l'axe perpendiculaire au sol, tout en permettant en pratique la rotation le long des deux axes restants.
je ne sais pas si j'ai été clair, mais je dois construire une plate-forme mobile motorisée qui oscille dans une direction antéro-postérieure et moyenne-latérale. . . .
merci à tous pour votre aide.. .