Do you know what engineers and jugglers have in common? On the surface, they seem like vastly different disciplines. However, dig a little deeper and you’ll see that just as a juggler must keep multiple objects in the air at once, engineers must keep multiple interconnected yet conflicting targets in balance as they navigate a complex design space.
In the world of vehicle development, this delicate balancing act is performed to find the optimal design variables that simultaneously meet design targets such as performance, efficiency and NVH (noise, vibration and harshness). This is a difficult task in practice however, as there are no ‘free lunches’ to take advantage of. Any modification that improves one design target tends to deteriorate at least one other.
A classic example of such a design variable is weight reduction. Engineers can strategically reduce the weight of certain components (while maintaining structural rigidity) for a lighter vehicle overall. This generally results in better performance and efficiency, as the vehicle will have less mass to accelerate and a lower rolling resistance. However, the flip side is that lighter components absorb less noise and vibration energy, leading to worse NVH performance in general.
This dilemma is at the heart of today’s electrified vehicle development. On one hand, customers want an efficient vehicle as it determines the maximum available range for a given battery capacity. On the other hand, customers are more critical than ever about NVH performance as even small squeaks and whines are audible in the absence of a noisy combustion-driven powertrain.
So, how can engineers find the optimal balance that satisfies all customer requirements? Let’s explore this question using a unique workflow in Simcenter Testlab that combines two cutting-edge technologies: Virtual Prototype Assembly and NVH Simulator.
An NVH engineer’s guide to juggling design targets
The first step is to implement a process for predicting vehicle-level NVH performance using component-level data. With such a process in place, we can easily monitor the sensitivity of the expected NVH performance to any design variable modification.
This process is called Virtual Prototype Assembly (VPA) in Simcenter Testlab. Essentially, every component of the vehicle can be represented using independent frequency-domain models containing different data (e.g., connection FRFs, invariant load spectra, dynamic stiffness, …) depending on the type of component. These component models are then mathematically coupled using Frequency-based Substructuring (FBS), which allows the NVH performance of the virtual assembly to be predicted. Crucially, any component can be represented using CAE- or test-based data depending on its development maturity.
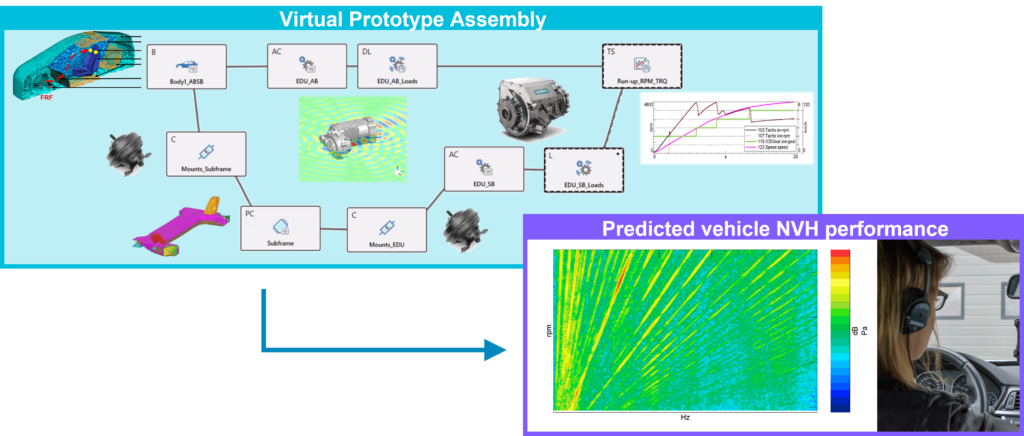
The second step is to correlate the results with subjective human perception by synthesizing the predicted frequency-domain vehicle NVH performance in the time-domain. This allows the impact of meaningful design changes to be evaluated directly (by hearing or feeling the difference) or quantified using time-domain processing methods such as sound quality metrics.
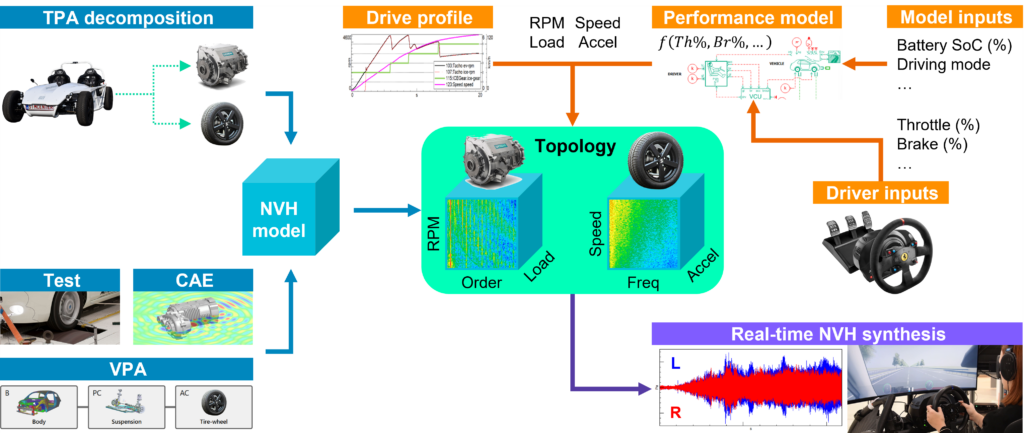
Simcenter Testlab NVH Simulator is a workbook for synthesizing frequency-domain contributions to vehicle NVH performance in the time domain. Essentially, each contribution (powertrain, wind, road noise, …) is represented by a frequency-domain NVH model that covers all relevant operating conditions. These NVH models are obtained using either bottom-up (e.g., predicted using VPA) or top-down (e.g., full vehicle decomposition) techniques. A realistic full vehicle NVH environment is then created by combining multiple NVH models in a vehicle topology. Finally, each NVH model is synthesized in real-time by monitoring the operating condition of the vehicle, either directly from a predefined drive profile or simulated using a real-time performance model connected to actual driver inputs.
Hello old friend
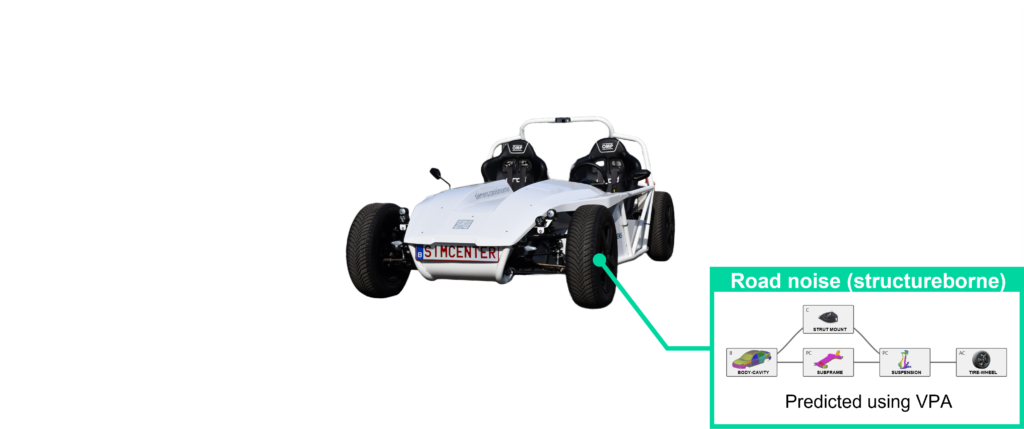
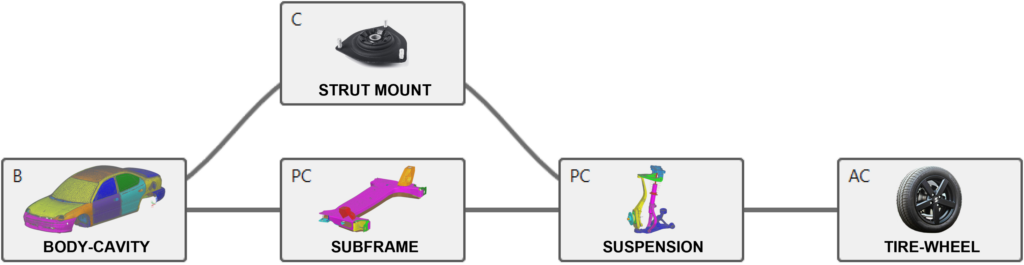
Let’s revisit our weight reduction example to see how this workflow can be applied in practice. Imagine we are developing a new vehicle variant on an existing platform, with the specific goal of optimizing structure-borne road noise. To study this variant’s sensitivity to weight reduction, we have created a VPA model where the body-cavity, subframe and suspension models are CAE-based, while the strut mount model uses supplier-provided dynamic stiffness and the tires were characterized on a physical tire test bench using a rough surface profile.
The raw output of this VPA model will be the predicted structure-borne road noise for all speeds that were characterized on the tire test bench. After mapping these predictions to an NVH model, we can use the NVH Simulator to synthesize structure-borne road noise using any random speed profile. The results below were generated using a synthetic coast-down from 70 to 0 km/h.