@ndreaR
Guest
Hello, everyone!
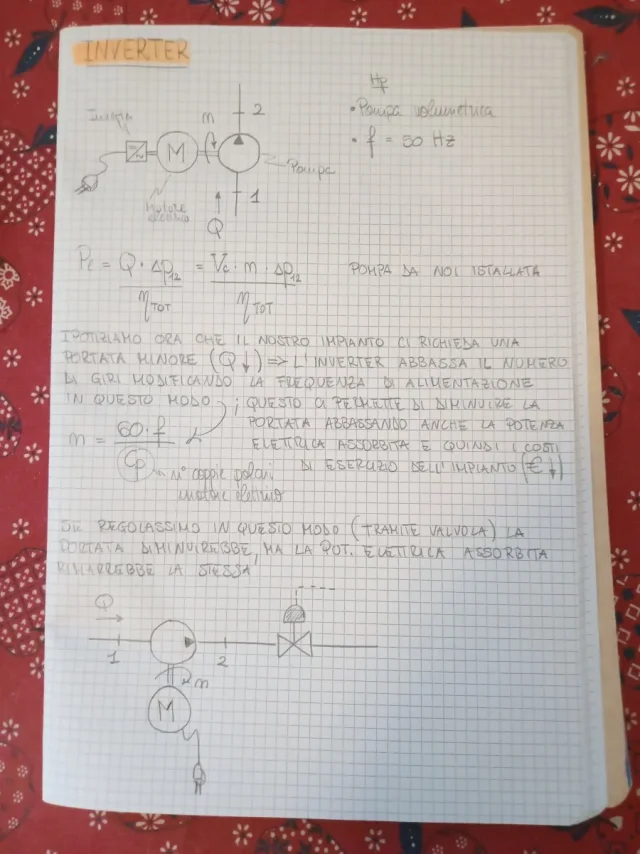
I am trying to understand the dynamics of operation behind an inverter, especially for the regulation of pumps, fans, etc. in plants. I wanted to propose this scheme (which I made without inspiring books and dispenses so it could also be a complete ahahah cable) of I as I guessed the operation of an inverter. I leave you to the commented scheme and obviously corrections, insights are extremely welcome! ! I posted in the mechanical design section because I don't want to treat the subject from a purely electronic/electronic point of view but mainly as an integration of a mechanical system
I am trying to understand the dynamics of operation behind an inverter, especially for the regulation of pumps, fans, etc. in plants. I wanted to propose this scheme (which I made without inspiring books and dispenses so it could also be a complete ahahah cable) of I as I guessed the operation of an inverter. I leave you to the commented scheme and obviously corrections, insights are extremely welcome! ! I posted in the mechanical design section because I don't want to treat the subject from a purely electronic/electronic point of view but mainly as an integration of a mechanical system