

Treten Sie dem Forum für Designer bei!
Ihr Fachwissen ist wichtig für die Gemeinschaft. Helfen Sie uns und bringen Sie Ihr Wissen ein!
Jetzt dem Forum beitretenTauschen Sie sich aus, lernen Sie und wachsen Sie mit den besten Fachleuten der Branche.
ZUSAMMENFASSUNG
Für Benutzer von Ansys Mechanical kann der Umstieg auf Ansys Motion leistungsstarke neue Funktionen erschließen – aber dieser Umstieg erfordert mehr als nur die Navigation in einer vertrauten Oberfläche. Obwohl beide Werkzeuge die gleiche grafische Umgebung nutzen, basieren sie auf grundlegend unterschiedlichen Solvern und Modellierungsansätzen. Das Verständnis dieser konzeptionellen Unterschiede ist entscheidend für die effektive Nutzung von Ansys Motion und die Vermeidung gängiger Fallstricke. Unabhängig davon, ob Sie Ihren Simulationsumfang erweitern oder Ihre aktuellen Arbeitsabläufe verbessern möchten, ist es für eine erfolgreiche und effiziente Integration von entscheidender Bedeutung zu wissen, wo Mechanical endet und Motion beginnt. In diesem Blog gehen wir auf diese kritischen Unterscheidungen ein, um Mechanical-Anwendern einen sicheren Einstieg in die Welt der Mehrkörperdynamik zu ermöglichen.
In diesem Blog konzentrieren wir uns nicht auf spezifische Einrichtungsdetails. Vielmehr geht es darum, die allgemeinen Unterschiede zwischen Ansys Mechanical und Ansys Motion hervorzuheben. Obwohl beide Werkzeuge Teil desselben Simulationsökosystems sind, basieren sie auf unterschiedlichen Modellierungsphilosophien. Das bedeutet, dass Mechanical-Anwender ihre typische Vorgehensweise anpassen müssen, um Ansys Motion effektiv nutzen zu können. Wir werden uns mit den wichtigsten Konzepten und Anpassungen befassen, die für eine erfolgreiche Umstellung der Arbeitsabläufe und die volle Nutzung der Möglichkeiten von Ansys Motion unerlässlich sind.
Einzigartige Merkmale der Motion-Einrichtung
Betrachtet man die Art und Weise, wie die Dinge in Motion definiert sind, so lassen sich zwei Hauptunterschiede zu Mechanical feststellen:
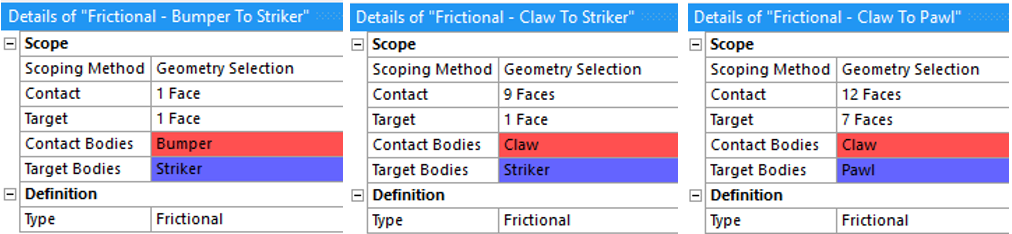
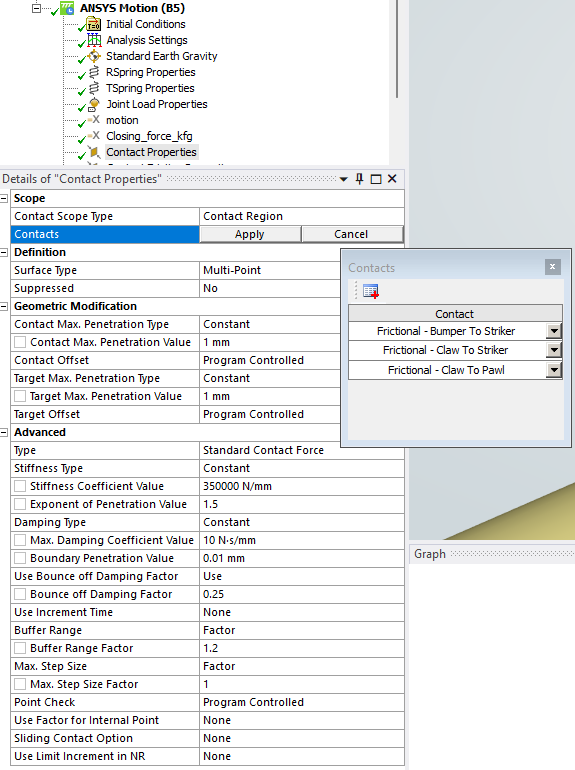
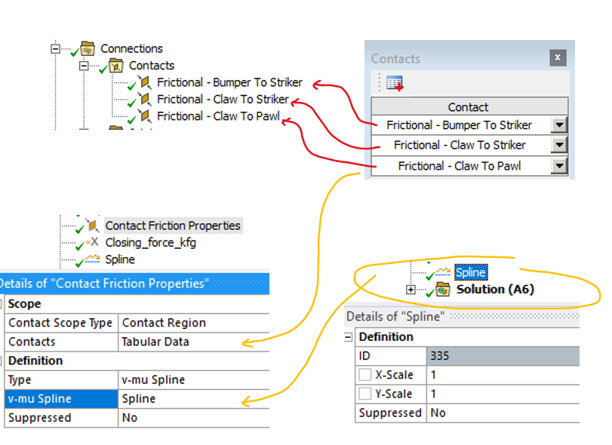
- Gruppierte Eigenschaftsdefinitionen: In Motion ist es möglich, Eigenschaften für mehrere ähnliche Objekte zu definieren, indem ein unabhängiges Eigenschaftsobjekt verwendet wird, das für die gesamte Gruppe gilt. Damit soll vermieden werden, dass für jedes einzelne Objekt die gleichen Werte definiert werden. Stellen Sie sich ein Modell mit Dutzenden von Kontakten vor, für die Sie jeweils ähnliche Reibungseigenschaften definieren müssen. Wenn Sie mit Mechanical arbeiten, müssen Sie den Reibungskoeffizienten in jedem Abschnitt der Kontakteigenschaften definieren. In Motion können Sie durch die Erstellung eines Objekts für die Kontakteigenschaften auf alle gewünschten Kontaktpaare verweisen und die Werte einmal definieren.in diesem Beispiel sehen wir ein Modell mit drei definierten Kontakten, um die Interaktion zwischen mehreren Teilen zu berücksichtigen. In dieser Konfiguration gibt es zwei Motion-Objekte, die die numerischen und Reibungseigenschaften definieren. Im Vergleich zu Mechanical wäre eine vollständige Definition in jedem Kontaktobjekt erforderlich.

Definition von Kontakten:
Objekt mit Kontakteigenschaften: Beachten Sie, dass der Bereich eine Liste mit den drei definierten Kontaktobjekten ist.
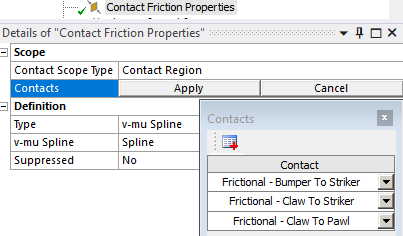
Kontakt Reibungseigenschaften:
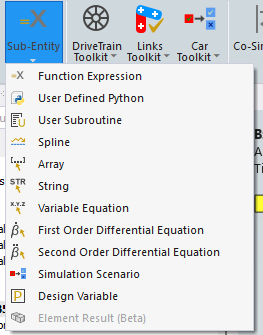
- Verwendung von Funktionen: Der zweite große Unterschied ist die Art und Weise, wie man Funktionen erstellt. In Mechanik können Sie einige grundlegende Funktionen direkt am Objekt definieren (z. B. um eine zeitlich variable Kraft zu definieren). In Motion können Sie über das Menü Sub-Entity erweiterte Funktionen erstellen. Eine genauere Erläuterung der verfügbaren Funktionen finden Sie in der Ansys-Hilfe: https://ansyshelp.ansys.com/account/secured?returnurl=/Views/Secured/corp/v251/en/motion_ug/motion_ug_using_motionfeat.html
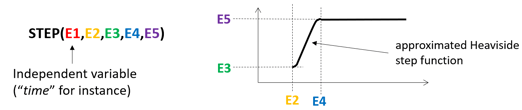
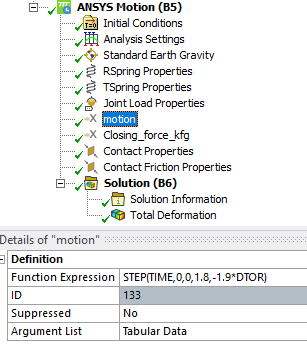
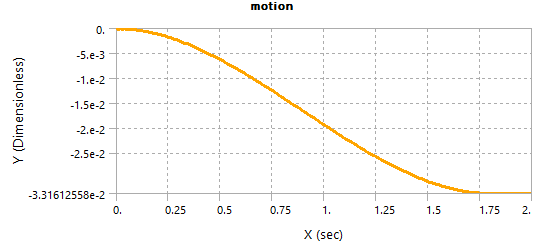
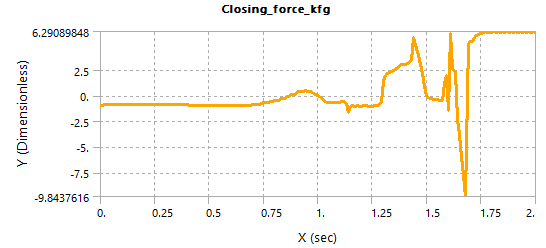
Um mit dem Beispiel fortzufahren, wurden mit dem Objekt „Funktionsausdruck“ zwei Funktionen erstellt. Die erste Funktion definiert eine Rotationsverschiebung für ein Gelenk. Die zweite Funktion berechnet das Reaktionsmoment auf ein Drehgelenk.Ausdruck der Funktion: STEP. Diese Funktion erzeugt einen sanften Übergang zwischen einem Minimal- und einem Maximalwert während zweier „Zeitpunkte“. Unsere Funktion soll eine Drehung definieren, deshalb wandeln wir das letzte Argument mit Hilfe der DTOR-Konstante in Bogenmaß um.
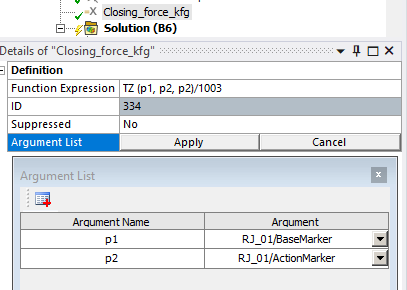
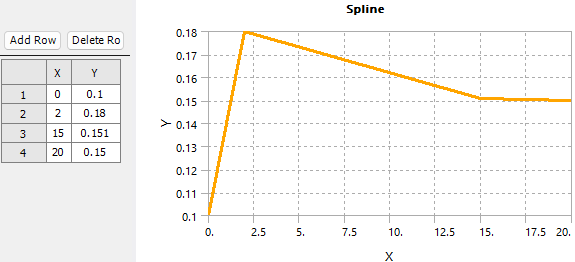
Ausdruck der Funktion: TZ. Diese Funktion berechnet das Drehmoment an einem Drehgelenk namens RJ_01. Sie verwendet zwei Argumente namens p1 und p2. Es handelt sich um Markierungen, die automatisch auf dem Gelenk erstellt werden. - Verschachtelte Definitionen: Wie Sie sich vorstellen können, müssen die zuvor definierten unabhängigen Objekte irgendwie zusammengefügt werden, um den Aufbau zu vervollständigen. In dem Beispielmodell ist der Reibungskoeffizient nicht konstant. Es wird ein Spline erstellt, um die Variation dieses Koeffizienten mit der relativen Geschwindigkeit zu definieren. Dann benötigen wir ein Spline-Objekt, das im Objekt Kontaktreibungseigenschaften verwendet wird, und dieses Objekt wird zur Definition des Kontaktverhaltens verwendet. Die Logik ist die gleiche, auch wenn wir keine spezifische Verbindung zwischen den Objekten benötigen.

SCHLUSSFOLGERUNG
- Ansys Motion verwendet die gleichen Vorverarbeitungsfunktionen wie eine standardmäßige mechanische Simulation: Geometrie, Verbindungen, Kontakt und Vernetzung.
- Es gibt einige spezielle Funktionen für Ansys Motion für: Körpereigenschaften und Markierungen, Kontakteigenschaften, spezielle Verbindungsrandbedingungen und Kräfte, variable Ausdrücke, Co-Simulationsschaltflächen, Exportdateien und die Ausführung des Ansys Motion Postprozessors.
Treten Sie dem Forum für Designer bei!
Ihr Fachwissen ist wichtig für die Gemeinschaft. Helfen Sie uns und bringen Sie Ihr Wissen ein!
Jetzt dem Forum beitretenTauschen Sie sich aus, lernen Sie und wachsen Sie mit den besten Fachleuten der Branche.