Dario-CRC
Guest
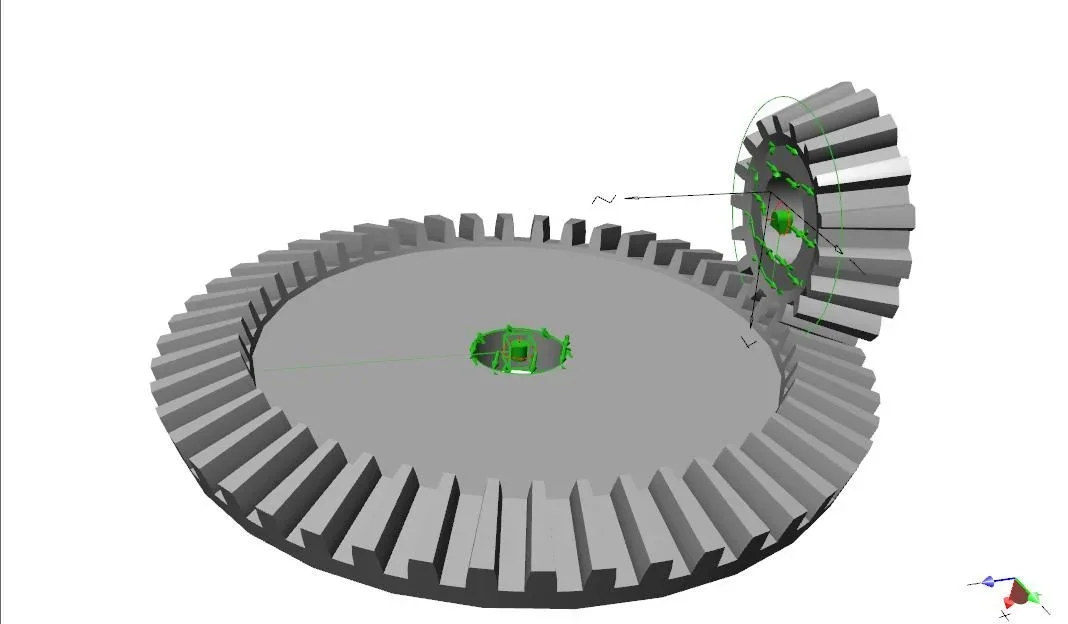
hallo an alle, ich nutze ihre freundlichkeit, um einen zweifel zu klären. ich entwerfen einen mechanischen reduzierer, bestehend aus zwei konischen rädern mit zähnen gerade zu konkurrierenden achsen (90°). wo entsteht mein problem? ich sollte eine kinetodynamische analyse mit vn4d durchführen, aber ich kann die kollision zwischen den beiden rädern nicht simulieren.
wie ich fahre:
1) als erster in der federkiste die kegelrad option zwischen den beiden kegelrädern
2) auf die spindelmotor-option durch einstellung seiner winkelgeschwindigkeit auferlegt.
3)grenzoption löschen
4) ich habe ein drehgelenk im rad aufgestellt
an dieser stelle dreht sich das ritzel mit seiner winkelgeschwindigkeit. das rad dreht sich stattdessen selbst (auch in der entgegengesetzten richtung), natürlich auch ohne kollisionen zu berücksichtigen. ich kann nicht herausfinden, wo ich falsch bin. danke im voraus für alle antworten.
wie ich fahre:
1) als erster in der federkiste die kegelrad option zwischen den beiden kegelrädern
2) auf die spindelmotor-option durch einstellung seiner winkelgeschwindigkeit auferlegt.
3)grenzoption löschen
4) ich habe ein drehgelenk im rad aufgestellt
an dieser stelle dreht sich das ritzel mit seiner winkelgeschwindigkeit. das rad dreht sich stattdessen selbst (auch in der entgegengesetzten richtung), natürlich auch ohne kollisionen zu berücksichtigen. ich kann nicht herausfinden, wo ich falsch bin. danke im voraus für alle antworten.