morezz
Guest
bye to all,
ich muss die arme einer aufhängung mit sw 2009 ausgehend von der rahmen- und radposition realisieren.
mit erfinder ich positionierte den rahmen fest an der herkunft und das rad in der gewünschten position. so schuf ich den aufhängearm als adaptives teil, so dass es möglich war, seine geometrie automatisch zu ändern, indem die einschränkungen geändert wurden, die das rad festlegten. also nahm ich das teil, entriegelte die radzwänge und versuchte, die aufhängung zu bewegen.
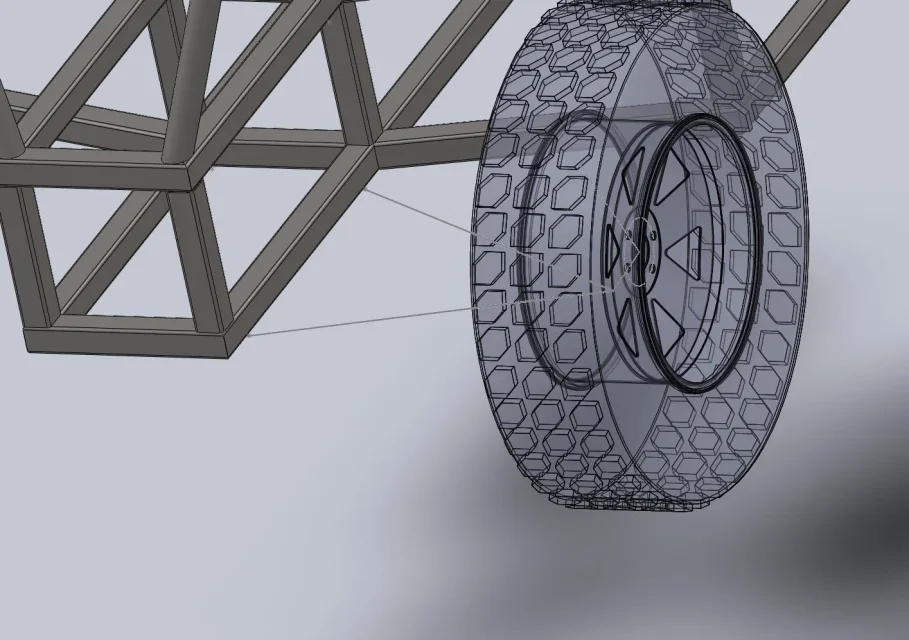
ich versuchte, das gleiche mit sw zu tun, aber ohne ergebnis. dort ist ein bild von rahmen und rad mit der tragarmskizze angebracht. ich habe versucht, ein teil mit einer 3d skizze zu machen, die die befestigungspunkte am rahmen und an der radhalterung erreicht. wenn das rad jedoch bricht, bewegt es sich in den raum, ohne das vorhandensein des dreiecks wiederzugeben, das sich kontinuierlich an die neue position anpasst.
wo bin ich falsch?
danke.
matt
ich muss die arme einer aufhängung mit sw 2009 ausgehend von der rahmen- und radposition realisieren.
mit erfinder ich positionierte den rahmen fest an der herkunft und das rad in der gewünschten position. so schuf ich den aufhängearm als adaptives teil, so dass es möglich war, seine geometrie automatisch zu ändern, indem die einschränkungen geändert wurden, die das rad festlegten. also nahm ich das teil, entriegelte die radzwänge und versuchte, die aufhängung zu bewegen.
ich versuchte, das gleiche mit sw zu tun, aber ohne ergebnis. dort ist ein bild von rahmen und rad mit der tragarmskizze angebracht. ich habe versucht, ein teil mit einer 3d skizze zu machen, die die befestigungspunkte am rahmen und an der radhalterung erreicht. wenn das rad jedoch bricht, bewegt es sich in den raum, ohne das vorhandensein des dreiecks wiederzugeben, das sich kontinuierlich an die neue position anpasst.
wo bin ich falsch?
danke.
matt