Luigiru
Guest
Hallo alle,
Ich habe ein Problem mit meinem Produkt und Kinematik. Ich sollte die Übertragung des Fahrrads durch dichte Kegelräder zwischen den beiden Bäumen ausführen, die in der Figur gezeigt sind.
für die Realisierung des Endproduktes folgte ich diesem Tutorial, das auch eine Anleitung zur Realisierung der Kegelräder ist:
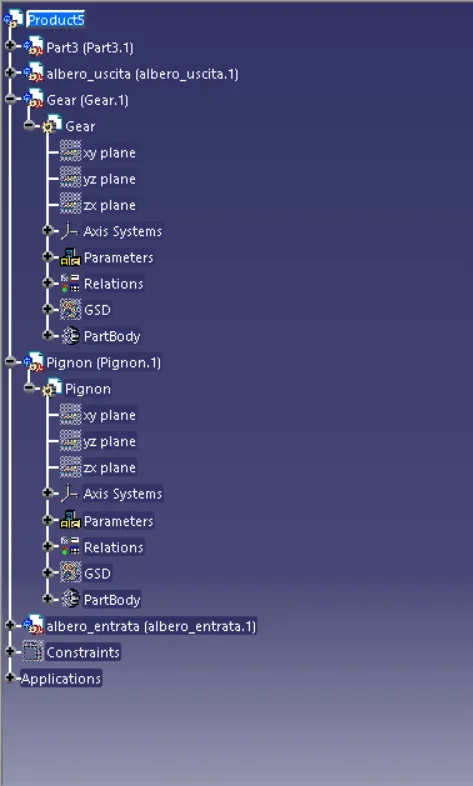
Ich machte den Einlassbaum mit seinem Ritzel und die abgehende Welle mit der Nabe und dem Zahnrad. Angehängt können Sie ein Foto von dem, der gerade gemacht.
das Problem ist, dass ich zunächst versuchte, 4 Teile im Sarg zu machen:
Eingangswelle, Ausgangswelle, Ritzel, Getriebe
Aber ich konnte den Mechanismus nicht simulieren. dann einige Online-Tutorials betrachtet, erkannte ich, dass es notwendig war, 3 Teile zu machen:
Eingangs- und Ausgangswelle zusammen, Ritzel und Getriebe.
so kann ich den Mechanismus simulieren, auch wenn mit einem Problem. Probleme sind wie folgt:
1) Ich kann nicht verstehen, warum es braucht 3 Teile und nicht 4.
2) In der Skizze der Bäume habe ich eine Quote aus der Hauptreferenz gesetzt, aber wenn ich gehe, um den Mechanismus zu simulieren, bekomme ich als Ergebnis "es ist nicht möglich, den Mechanismus zu simulieren, weil er überverlinkt ist" (wenn ich einige Bindungen entfernen und diese Quoten in den Skizzen, der Mechanismus arbeitet)
3) besteht der Mechanismus aus der Bewegung eines Baumes und seines Ritzels, was zu einer Bewegung des Zahnrades und der abgehenden Welle führt. Um den Mechanismus zu simulieren, erfordert Catia, dass ein Teil fixiert wird. in meinem Fall habe ich den Teil der abgehenden und ankommenden Bäume (wie in dem Video, das ich früher gesendet habe, in die Minute 1 Stunde,07 Minuten) fixiert. Dies entspricht jedoch nicht der Realität, wo sich beide Bäume bewegen. Wie kann ich das Problem überwinden?
Wenn mir jemand gerne hilft, kann ich die verschiedenen Teile und das Endprodukt per E-Mail senden, kontaktieren Sie mich privat, damit ich alles austauschen kann.
Sag hallo.
Ich habe ein Problem mit meinem Produkt und Kinematik. Ich sollte die Übertragung des Fahrrads durch dichte Kegelräder zwischen den beiden Bäumen ausführen, die in der Figur gezeigt sind.
für die Realisierung des Endproduktes folgte ich diesem Tutorial, das auch eine Anleitung zur Realisierung der Kegelräder ist:
das Problem ist, dass ich zunächst versuchte, 4 Teile im Sarg zu machen:
Eingangswelle, Ausgangswelle, Ritzel, Getriebe
Aber ich konnte den Mechanismus nicht simulieren. dann einige Online-Tutorials betrachtet, erkannte ich, dass es notwendig war, 3 Teile zu machen:
Eingangs- und Ausgangswelle zusammen, Ritzel und Getriebe.
so kann ich den Mechanismus simulieren, auch wenn mit einem Problem. Probleme sind wie folgt:
1) Ich kann nicht verstehen, warum es braucht 3 Teile und nicht 4.
2) In der Skizze der Bäume habe ich eine Quote aus der Hauptreferenz gesetzt, aber wenn ich gehe, um den Mechanismus zu simulieren, bekomme ich als Ergebnis "es ist nicht möglich, den Mechanismus zu simulieren, weil er überverlinkt ist" (wenn ich einige Bindungen entfernen und diese Quoten in den Skizzen, der Mechanismus arbeitet)
3) besteht der Mechanismus aus der Bewegung eines Baumes und seines Ritzels, was zu einer Bewegung des Zahnrades und der abgehenden Welle führt. Um den Mechanismus zu simulieren, erfordert Catia, dass ein Teil fixiert wird. in meinem Fall habe ich den Teil der abgehenden und ankommenden Bäume (wie in dem Video, das ich früher gesendet habe, in die Minute 1 Stunde,07 Minuten) fixiert. Dies entspricht jedoch nicht der Realität, wo sich beide Bäume bewegen. Wie kann ich das Problem überwinden?
Wenn mir jemand gerne hilft, kann ich die verschiedenen Teile und das Endprodukt per E-Mail senden, kontaktieren Sie mich privat, damit ich alles austauschen kann.
Sag hallo.