App installieren
So wird die App in iOS installiert
Folge dem Video um zu sehen, wie unsere Website als Web-App auf dem Startbildschirm installiert werden kann.
Anmerkung: Diese Funktion ist in einigen Browsern möglicherweise nicht verfügbar.
Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Stan9411
Guest
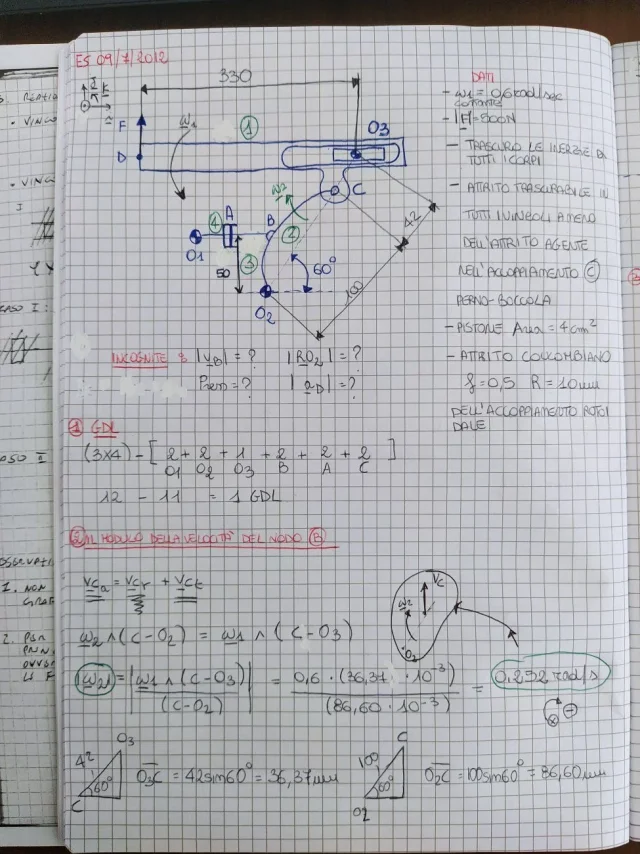
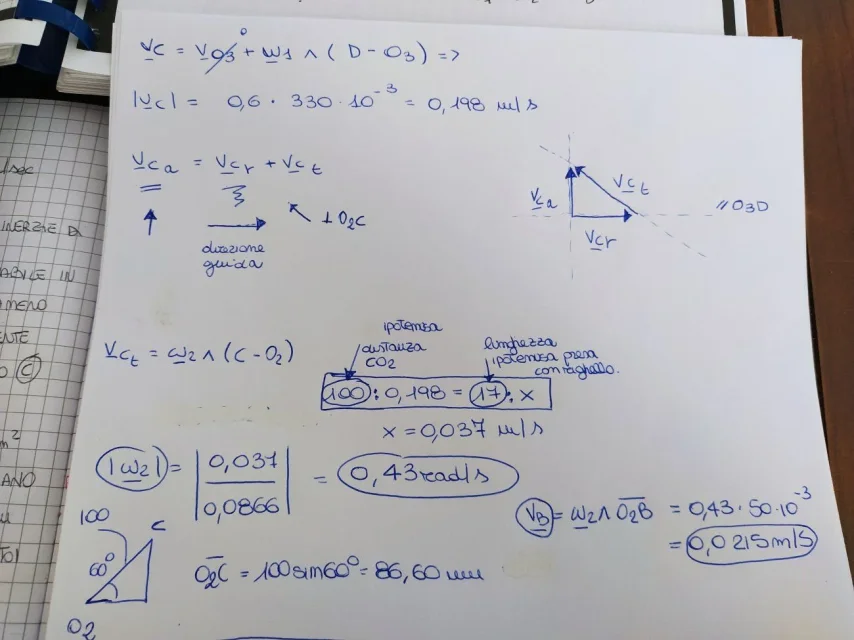
„vc relative“ bedeutet nichts, außer wenn Sie festlegen, was. hängt davon ab, wo Ihr Referenzsystem ist.
Martakynghi
Guest
Stan9411
Guest
Ich habe nicht alle Berechnungen gesehen, aber ich höre auf den ersten Fehler:
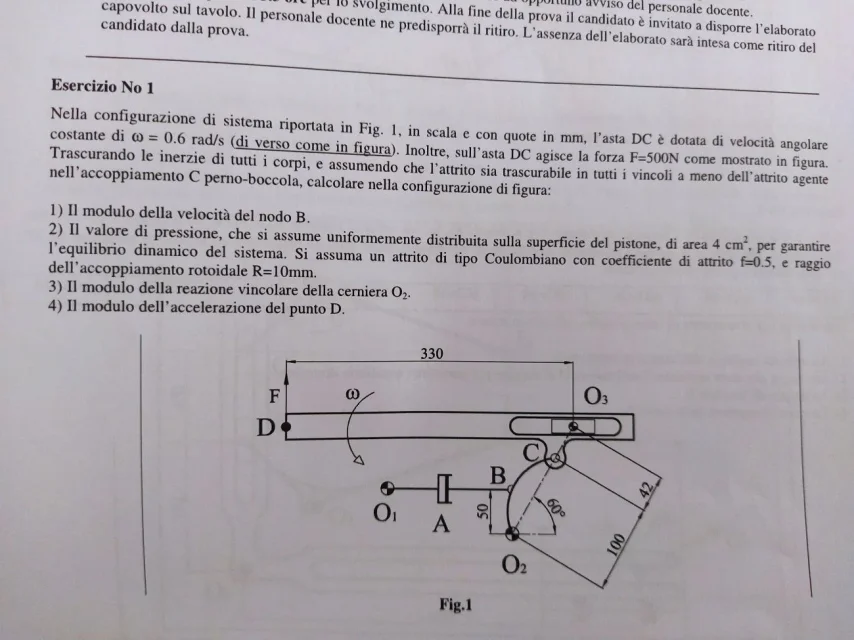
die Geschwindigkeit von c im Vergleich zu o3 kann nicht einfach w1*(c-o3) sein... denn zwischen dem Knoten o3 und dem Schaft cd gibt es eine Hülse... dann schalten Sie sie auf o3... sonst würde das System keine gdl...
die Geschwindigkeit von c im Vergleich zu o3 kann nicht einfach w1*(c-o3) sein... denn zwischen dem Knoten o3 und dem Schaft cd gibt es eine Hülse... dann schalten Sie sie auf o3... sonst würde das System keine gdl...
Martakynghi
Guest
die Geschwindigkeit o3 d.h. die Kraft 500 n * die Verschiebung 330 * 10^-3 m
Stan9411
Guest
Abgesehen davon ist 330 keine Bewegung, sondern die Länge des do3 Arms.
Kraft durch Arm macht ein Paar und Sie wollen es zu einer Geschwindigkeit hinzufügen...... beruhigen und denken.
das Problem muss erst filmisch gelöst werden. sobald Sie die Geschwindigkeiten von jedem bemerkenswerten Punkt kennen, können Sie eine Balance von Kräften schreiben und zurück zu Kräften und Paaren an verschiedenen Punkten Ihres Systems (dynamische Balance)
Kraft durch Arm macht ein Paar und Sie wollen es zu einer Geschwindigkeit hinzufügen...... beruhigen und denken.
das Problem muss erst filmisch gelöst werden. sobald Sie die Geschwindigkeiten von jedem bemerkenswerten Punkt kennen, können Sie eine Balance von Kräften schreiben und zurück zu Kräften und Paaren an verschiedenen Punkten Ihres Systems (dynamische Balance)
Martakynghi
Guest
Martakynghi
Guest
Stan9411
Guest
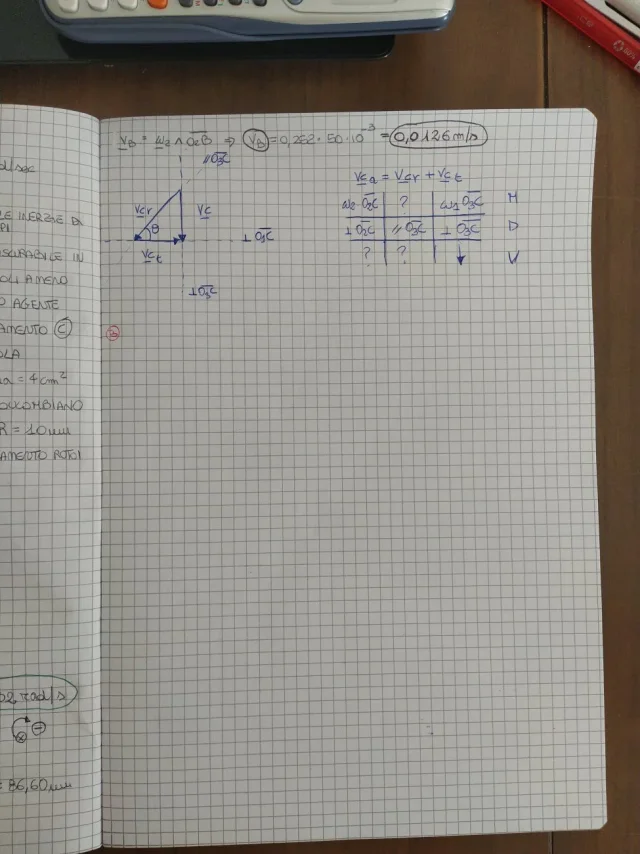
 Ich setze die filmische Schließung, wie Sie oben rechts sehen können. Natürlich beziehen sich die Symbole, die Sie in den Gleichungen sehen, auf diesen Verschluss.... machen keine Verwirrung mit dem ursprünglichen Schema auf der linken Seite ... leider sind die Buchstaben des Alphabets begrenzt.
Ich setze die filmische Schließung, wie Sie oben rechts sehen können. Natürlich beziehen sich die Symbole, die Sie in den Gleichungen sehen, auf diesen Verschluss.... machen keine Verwirrung mit dem ursprünglichen Schema auf der linken Seite ... leider sind die Buchstaben des Alphabets begrenzt.Durch die Lösung dieses Gleichungsmoments nach Beta-Drehung können Sie in jedem Augenblick die Winkellage von o2c (in dieser Schematisierung = alpha) und die Position des do3-Ventils (in dieser Schematisierung = c) kennen.
dann müssen Sie diese Gleichungen ableiten und Sie werden die Auflösung auch in der Geschwindigkeit haben... was dann ist, was Sie interessiert
Stan9411
Guest
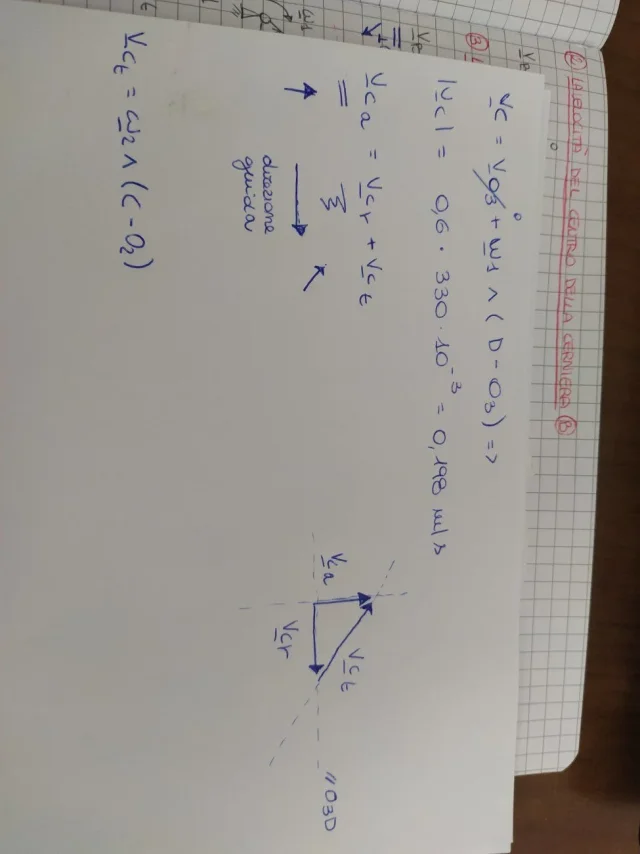
Sie müssen mir vergeben, wenn ich das Problem nicht aufzwinge “punktuell” ... Ich löse zuerst den ganzen Kinoismus... Wenn ich weiß, dass ich alles habe, gehe ich durch die Stücke, die ich für die Berechnung der Daten benötigte.so ist der erste Punkt vollständig
Wie diese von Ihnen auf der Grundlage der Dreiecke der Geschwindigkeit im einzigen Punkt c gemacht, für mich ist es riskant, weil Sie einige nicht-lineare Wirkung aufgrund der Tatsache vergessen, dass 03 ist ein Reißverschluss Ärmel ... dann ist es vielleicht richtig, aber es erfordert eine mentale Abstraktion zu groß ... anstatt, wenn ich die filmische Schließung des gesamten Systems, Ich bin sicher, dass nichts kann mir entkommen.
Martakynghi
Guest
Ihre Entschließung scheint zu kompliziert. Ich werde mich genauer ansehen.
Ich folgte der Entschließung meines Professors.
und sind bei den ersten Waffen der angewandten Mechanik möchte ich gut verstehen, dass diese Vektorauflösung von Geschwindigkeit und Beschleunigung keine Probleme für die Untersuchung haben.
Ich folgte der Entschließung meines Professors.
und sind bei den ersten Waffen der angewandten Mechanik möchte ich gut verstehen, dass diese Vektorauflösung von Geschwindigkeit und Beschleunigung keine Probleme für die Untersuchung haben.