es ist möglich, das Gegenteil zu tun, d.h. von einer 2d-Sequenz, um eine 3d-Umgebung zu erstellen.
wo nur ein paar Highlights oder eine Cloud von Punkten mit 3d-Umgebung gemeint sind.
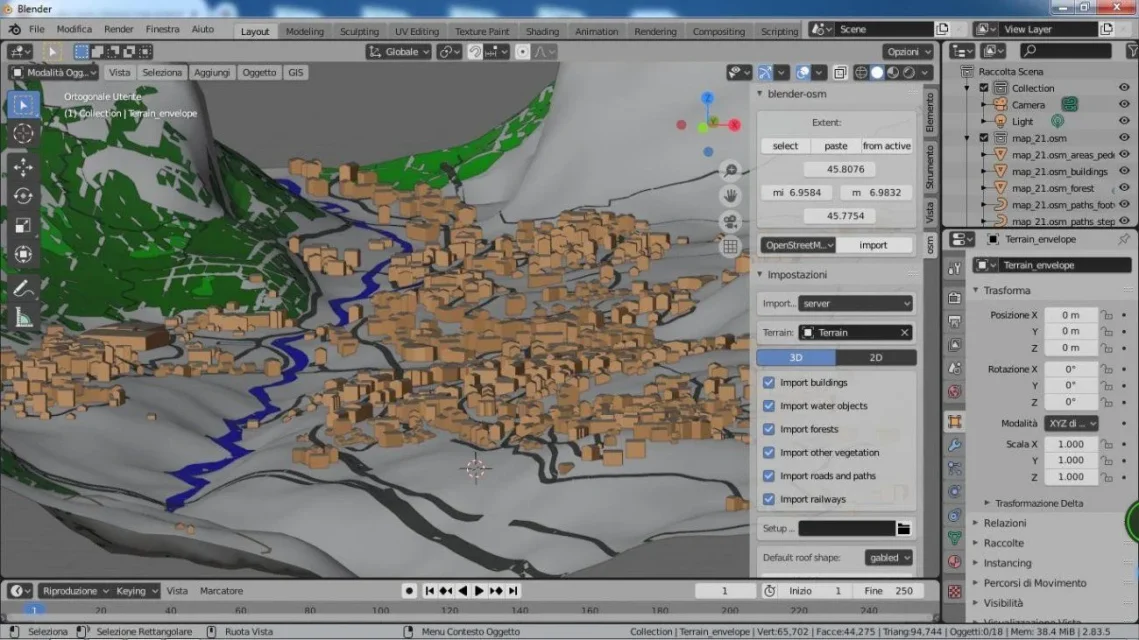
moderne Photogrammetrie-Programme versuchen, so viele Informationen wie möglich von einer Sequenz von Fotos zu erhalten, um eine Wolke von Punkten zurückzugeben
Aber sie sind enorm anspruchsvoll in Bezug auf die Qualität der zu bearbeitenden Bilder und um ein akzeptables Ergebnis zu erzielen, nehmen sie lange Zeit, um unsere Cloud von Punkten zurück.
traditionelle Matchmoving-Programme gibt keine Cloud zurück. nur die Highlights, die in der Umgebung 3d identifiziert werden.
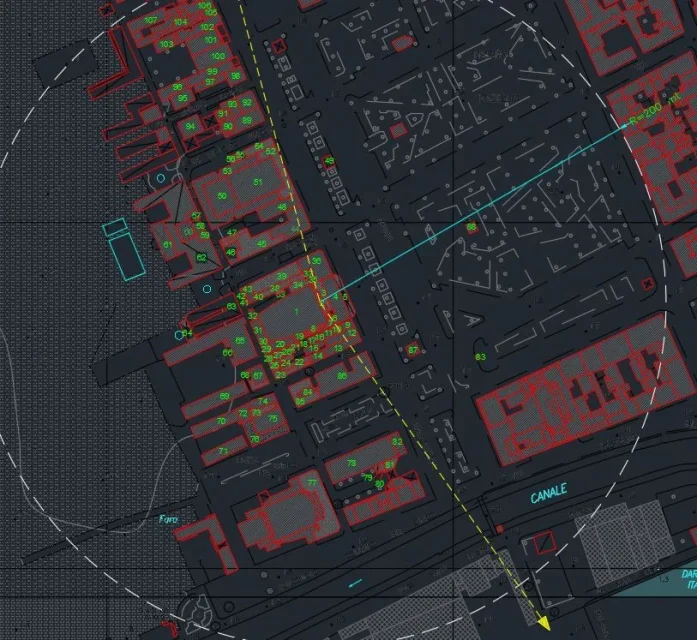
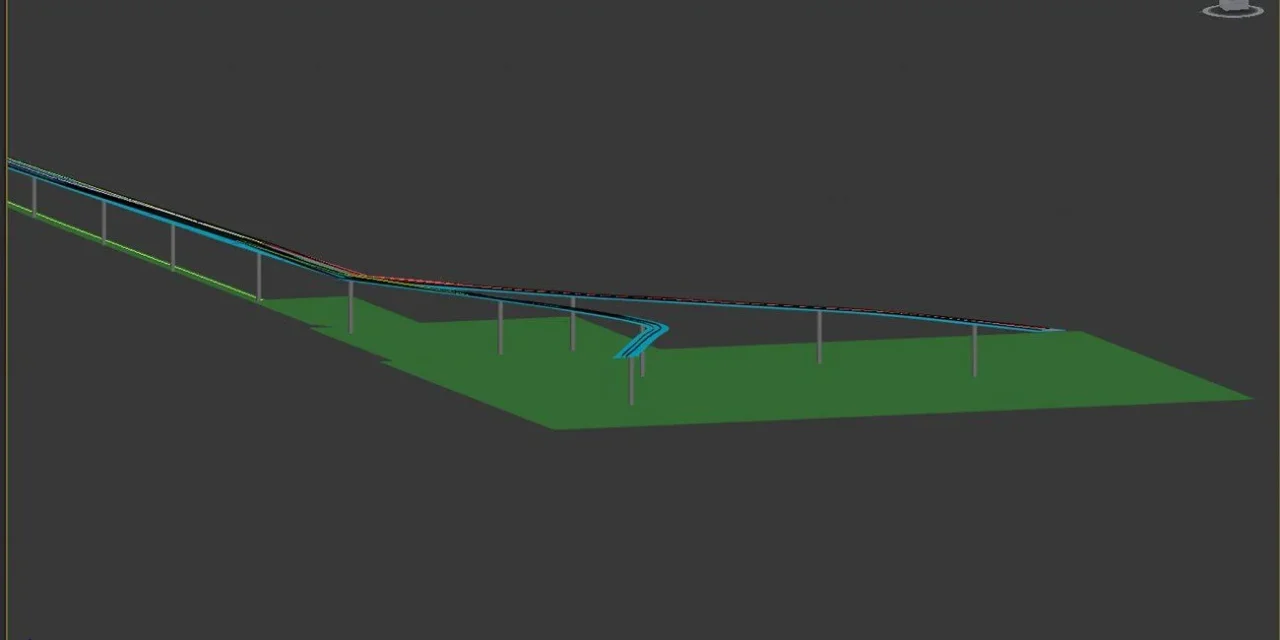
So rekonstruierte ich z.B. aus diesem survolo Video mit Google Earth das Netz 3d, das den Bereich der Intervention identifiziert, zusammen mit seinem altimetrischen Trend. Ich benutzte Syntheys für das Matchmoving. weil ich nicht eine ganze Wolke von Punkten haben musste, sondern nur jene Punkte relativ zu der Asphaltebene, die mir erlauben würde, den Plano altimetrisch zu zeichnen.
ein Netz 3d, auf dem zum Ziehen von Konstruktionsfesten, Maschen 3d aus einer Sequenz von 2d-Rahmen erhalten
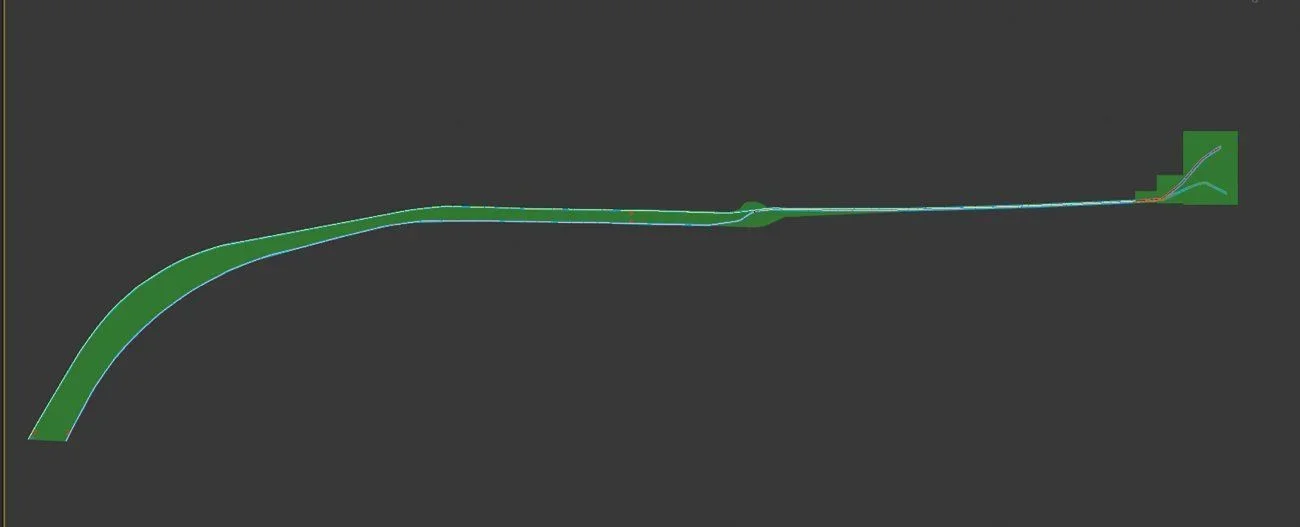
dass in blau das Netz 3d in Video 2d eingefügt ist.
Es ist nicht denkbar, eine solche Sache mit einem Photogrammetrie-Programm zu tun. eine Software zum Bearbeiten oder Tracking (in diesem Fall Handbuch) der Punkte, an denen wir interessiert sind. im konkreten Fall der in den Rahmen sichtbaren und nachvollziehbaren Punkte. Punkte, die Ölflecken auf Asphalt, Seitenkanten usw. sein können. Schließlich werden diese Punkte miteinander verbunden und Maschen erzeugt.
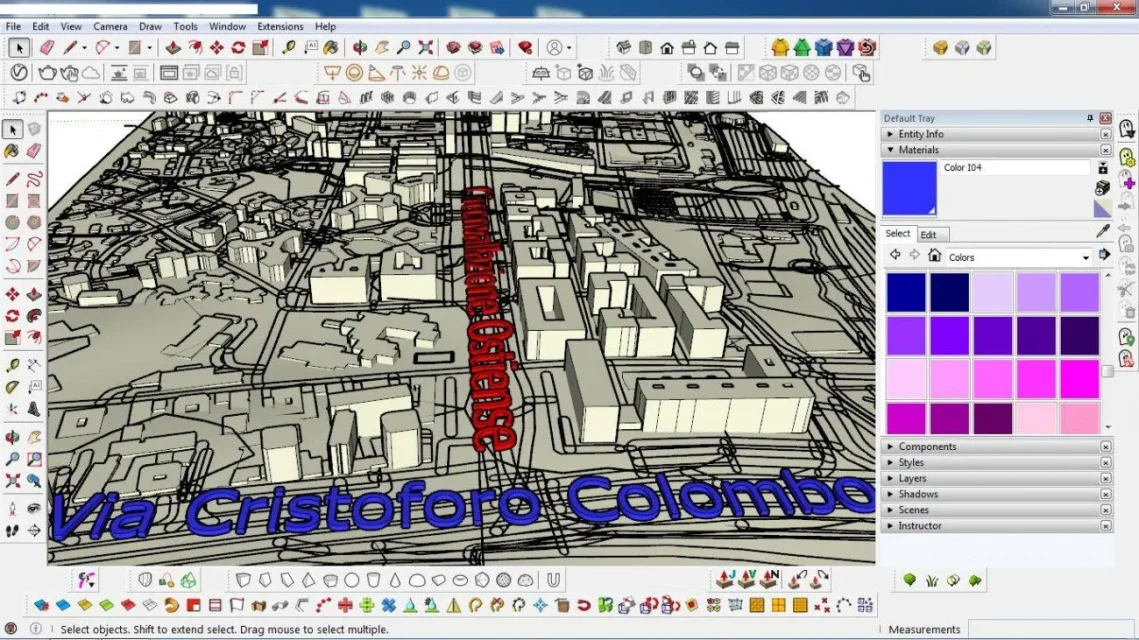
Sie könnten auch für die Wände der Gebäude tun, um die ungefähre Höhe zu rekonstruieren, aber es ist notwendig von der Software, die das Tracking der Punkte ermöglicht