Guidop
Guest
Hallo alle! Ich bin Maschinenbaustudent im dritten Jahr der dreijährigen Laufzeit und für die Konstruktionsprüfung von Maschinen entwerfe ich einen Pantographenlifter.
die Maschine besteht aus fünf Stadien des Pantographen, die Hebe- und Statik werden durch zwei parallel auf zwei Torsionsbäumen montierte Hydraulikzylinder gewährleistet (die Zylinder sind auf der Seite des Tulattas an den unteren Wellenbremsen (Punkt q) und auf der Seite des Schaftes an denen des oberen (Punkt p) angeschweisst) an den obliqui hf Armen
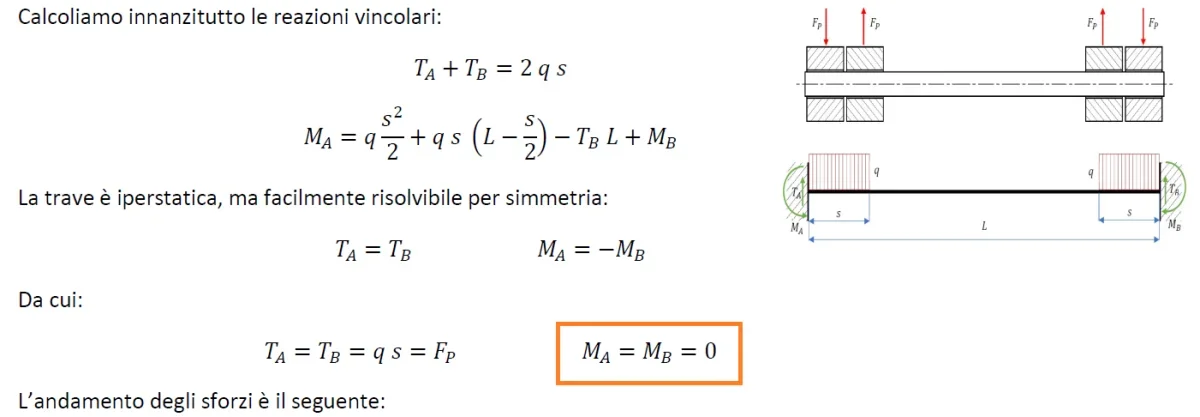
Ich hänge an den unteren Bildern des Lastmusters und der Torsionsbäume an.
für die Auflösung des statischen Problems nach Anhörung der Diskussion des Forums und einige Dissertation online betrachteten wir für den hf-Strahl den k-Punkt, in dem die Welle durch Konzentration der Kraft des fp-Kolbens in ihm verschweißt wird und Hinzufügen eines Biegemoments gleich dem Drehmomentmoment des Drehmomentbaums (gegeben durch fp für den Arm) und analog für den nm-Strahl und den k'-Punkt.
aber nun die Schweißnähte des Torsionsbaumes zu überprüfen (betrachte die fp und die mt konzentriert in w und y) Ich erkannte, dass an den beiden Extremen gerahmt ist hyperstatisch, d.h. es würde in den Gruben neben mt und fp auch ein sting Moment vorhanden sein; korrigieren Sie mich, wenn ich falsch bin.
Ein solches Stingmoment würde gegenüber den schrägen Armen des Pantographen in den Punkten k und k' abgeworfen, die zu ihnen beim Momenten Flexieren und Drehmoment konzentriert werden (und viele Berechnungen komplizieren).
Das Problem ist, dass ich keine Spur in den Auflösungen von Pantographen davon finde, fast als ob der Torsionsbaum als unterstützter Strahl behandelt wurde.
Ich wollte Sie fragen, ob meine Argumentation korrekt ist und wenn ich den Moment incastri k und k' als unannehmbar erachte (betrachte nur den von fp für seinen Arm).
Ich hänge auch die Magistralthese der Elite an, wo auf den Seiten 70/71 des pdf gezeigt wird, dass der Moment null ist, aber ich bekomme nicht viel zurück die Berechnungen.
Vielen Dank im Voraus für die Verfügbarkeit
die Maschine besteht aus fünf Stadien des Pantographen, die Hebe- und Statik werden durch zwei parallel auf zwei Torsionsbäumen montierte Hydraulikzylinder gewährleistet (die Zylinder sind auf der Seite des Tulattas an den unteren Wellenbremsen (Punkt q) und auf der Seite des Schaftes an denen des oberen (Punkt p) angeschweisst) an den obliqui hf Armen
Ich hänge an den unteren Bildern des Lastmusters und der Torsionsbäume an.
für die Auflösung des statischen Problems nach Anhörung der Diskussion des Forums und einige Dissertation online betrachteten wir für den hf-Strahl den k-Punkt, in dem die Welle durch Konzentration der Kraft des fp-Kolbens in ihm verschweißt wird und Hinzufügen eines Biegemoments gleich dem Drehmomentmoment des Drehmomentbaums (gegeben durch fp für den Arm) und analog für den nm-Strahl und den k'-Punkt.
aber nun die Schweißnähte des Torsionsbaumes zu überprüfen (betrachte die fp und die mt konzentriert in w und y) Ich erkannte, dass an den beiden Extremen gerahmt ist hyperstatisch, d.h. es würde in den Gruben neben mt und fp auch ein sting Moment vorhanden sein; korrigieren Sie mich, wenn ich falsch bin.
Ein solches Stingmoment würde gegenüber den schrägen Armen des Pantographen in den Punkten k und k' abgeworfen, die zu ihnen beim Momenten Flexieren und Drehmoment konzentriert werden (und viele Berechnungen komplizieren).
Das Problem ist, dass ich keine Spur in den Auflösungen von Pantographen davon finde, fast als ob der Torsionsbaum als unterstützter Strahl behandelt wurde.
Ich wollte Sie fragen, ob meine Argumentation korrekt ist und wenn ich den Moment incastri k und k' als unannehmbar erachte (betrachte nur den von fp für seinen Arm).
Ich hänge auch die Magistralthese der Elite an, wo auf den Seiten 70/71 des pdf gezeigt wird, dass der Moment null ist, aber ich bekomme nicht viel zurück die Berechnungen.
Vielen Dank im Voraus für die Verfügbarkeit


")