Fulvio Romano
Guest
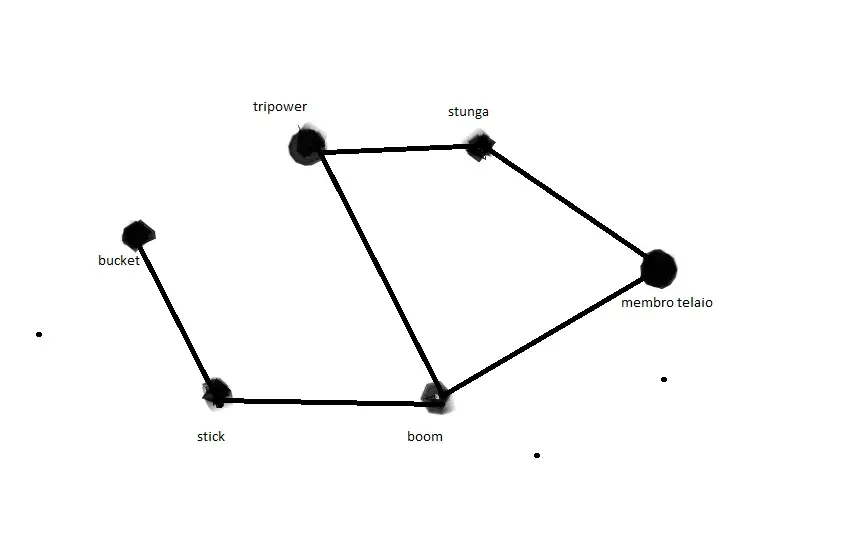
parce qu'ils sont des actionneurs, et non des membres du film.je vous remercie. je vais étudier votre réponse calmement.
quant aux trois cylindres hydrauliques, pourquoi ne les considérerais-je pas comme des membres ?
peut-être parce qu'ils sont des membres motivés et qu'ils n'ajoutent ou n'en retirent rien du mécanisme lui-même?
si vous aviez un moteur électrique sur le joint, considéreriez-vous également le stator et le rotor comme des membres?
je répète, je trouve mal de considérer les cylindres comme des membres de la structure cinématographique. si, cependant, votre professeur est d'autre opinion, il pourrait en vouloir et considérer mon point de vue comme une "erreur".
vérifiez bien.
") ?
?