@ndreaR
Guest
Bonjour tout le monde !
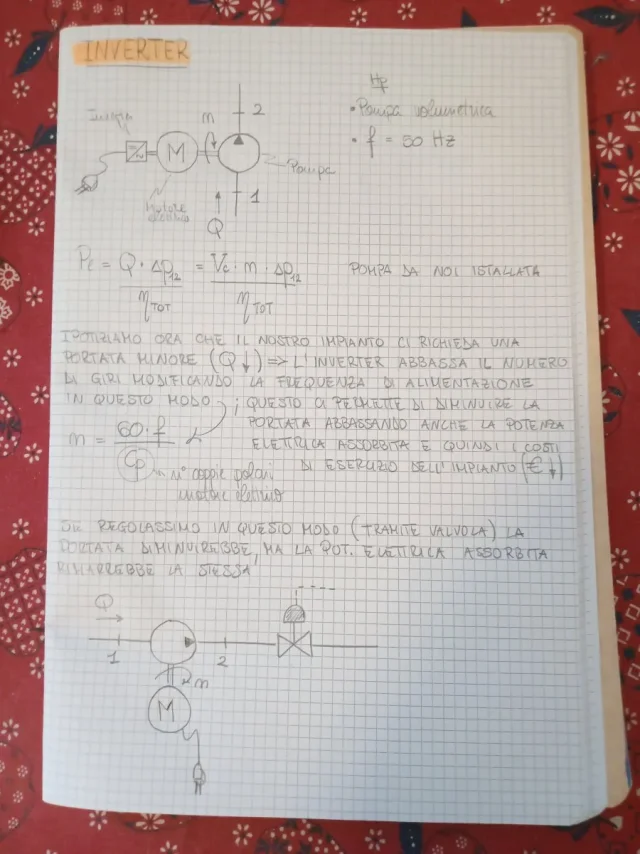
J'essaie de comprendre la dynamique de fonctionnement derrière un onduleur, en particulier pour la régulation des pompes, des ventilateurs, etc. dans les usines. Je voulais proposer ce schéma (que j'ai fait sans inspirer livres et dispenses pour qu'il puisse aussi être un câble complet ahahah) de moi comme je devine le fonctionnement d'un onduleur. Je vous laisse au schéma commenté et évidemment corrections, les idées sont les bienvenues ! ! J'ai affiché dans la section conception mécanique parce que je ne veux pas traiter le sujet d'un point de vue purement électronique/électronique, mais principalement comme une intégration d'un système mécanique
J'essaie de comprendre la dynamique de fonctionnement derrière un onduleur, en particulier pour la régulation des pompes, des ventilateurs, etc. dans les usines. Je voulais proposer ce schéma (que j'ai fait sans inspirer livres et dispenses pour qu'il puisse aussi être un câble complet ahahah) de moi comme je devine le fonctionnement d'un onduleur. Je vous laisse au schéma commenté et évidemment corrections, les idées sont les bienvenues ! ! J'ai affiché dans la section conception mécanique parce que je ne veux pas traiter le sujet d'un point de vue purement électronique/électronique, mais principalement comme une intégration d'un système mécanique