38luglio
Guest
Bonjour tout le monde,
pour mon travail de thèse je suis engagé dans la réalisation d'une interface de liaison entre un robot collaboratif générique, d'un poids maximal de 40 kg, avec un agv générique. cette interface doit permettre la rotation de l'ensemble du cobot autour d'un axe vertical pour le positionnement de celui-ci dans les opérations de pic et de place (ce besoin pourrait être dû, par exemple, à la volonté d'étendre l'accessibilité du bras ci-dessus, le montage d'une manière "excentrique" par rapport à l'axe de l'interface).
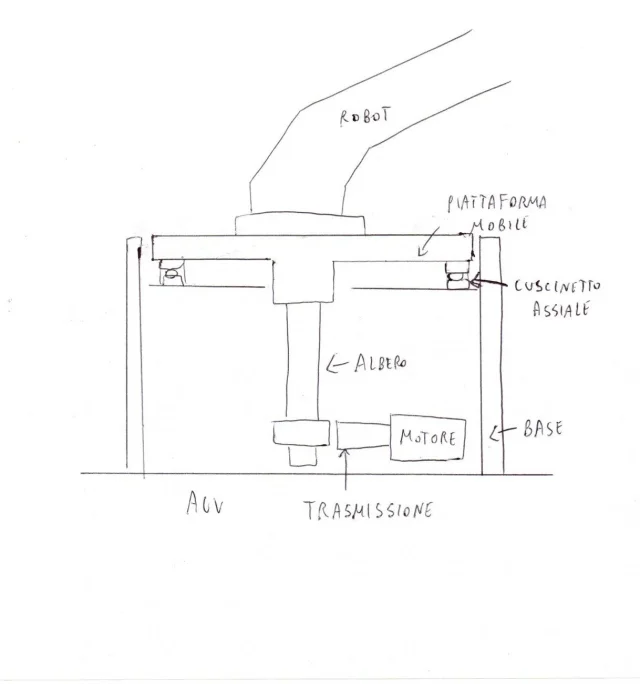
l'interface devra avoir une partie solide à l'agg et une partie tournante, sur laquelle le robot est monté. Pour le développer, j'avais pensé au schéma ci-joint, mais je vous demande quelques conseils sur la réalisation réelle, en termes de composants.
J'avais pensé à un moteur DC, connecté par une brochette ou une transmission d'accident, à un arbre sur lequel la plate-forme tournante qui tient le robot (peut-être au moyen d'un profil rainuré ou simplement au moyen d'un onglet). Compte tenu du fait que les paramètres du système tels que les données de la plaque du moteur et le rapport de transmission seront choisis à la suite de simulations ultérieures sur simulink, je voulais plus en détail sur la "couche" mécanique du système, en particulier sur la configuration verticale de l'arbre (spires, roulements, carrières, codons filetés, etc.) que, seulement pour fixer des idées, j'ai conçu parfaitement cylindrique. Considérez que la base de l'interface aura un diamètre de 500 mm et que la hauteur totale, à l'exclusion du robot, doit être aussi faible que possible. J'attends votre conseil, merci d'avance.
pour mon travail de thèse je suis engagé dans la réalisation d'une interface de liaison entre un robot collaboratif générique, d'un poids maximal de 40 kg, avec un agv générique. cette interface doit permettre la rotation de l'ensemble du cobot autour d'un axe vertical pour le positionnement de celui-ci dans les opérations de pic et de place (ce besoin pourrait être dû, par exemple, à la volonté d'étendre l'accessibilité du bras ci-dessus, le montage d'une manière "excentrique" par rapport à l'axe de l'interface).
l'interface devra avoir une partie solide à l'agg et une partie tournante, sur laquelle le robot est monté. Pour le développer, j'avais pensé au schéma ci-joint, mais je vous demande quelques conseils sur la réalisation réelle, en termes de composants.
J'avais pensé à un moteur DC, connecté par une brochette ou une transmission d'accident, à un arbre sur lequel la plate-forme tournante qui tient le robot (peut-être au moyen d'un profil rainuré ou simplement au moyen d'un onglet). Compte tenu du fait que les paramètres du système tels que les données de la plaque du moteur et le rapport de transmission seront choisis à la suite de simulations ultérieures sur simulink, je voulais plus en détail sur la "couche" mécanique du système, en particulier sur la configuration verticale de l'arbre (spires, roulements, carrières, codons filetés, etc.) que, seulement pour fixer des idées, j'ai conçu parfaitement cylindrique. Considérez que la base de l'interface aura un diamètre de 500 mm et que la hauteur totale, à l'exclusion du robot, doit être aussi faible que possible. J'attends votre conseil, merci d'avance.