

انضم إلى منتدى المصممين
خبرتك ضرورية للمجتمع. انضم إلينا وساهم بمعرفتك
انضم إلى المنتدى الآنشارك وتعلّم وتقدّم مع أفضل المحترفين في هذا المجال
يمكن تحقيق الفوز بالمزيد من الأعمال، واتخاذ قرارات أفضل، وتقليل عدد النماذج الأولية المادية من خلال اعتماد الاستراتيجيات المناسبة.
قبل عملي في شركة Siemens، عملت كمهندس تصميم لعدة سنوات، مستخدمًا مجموعة من برامج CAD وCAE لتطوير الآلات المخصصة ومعدات التشغيل الآلي. قدمت هذه المشاريع عقبتين رئيسيتين؛ الجداول الزمنية الصارمة للتسليم وعدم رغبة العميل في تمويل جهود البحث والتطوير، مما يؤدي إلى فرصة واحدة فقط لإنجاز الأمر بشكل صحيح. على الرغم من أن الوظيفة كانت ممتعة، إلا أنها كانت مرهقة أيضًا، حيث يمكن أن تؤدي التغييرات غير المتوقعة في التصميم إلى تآكل الأرباح بسرعة أو حتى تؤدي إلى الخسارة. في بعض الأحيان تسببت تغييرات التصميم في تأخير التسليم مما أدى للأسف إلى عدم رضا بعض العملاء.
باعتباري شخصًا شغوفًا بالتعلم مدى الحياة ويستمتع بمشاركة المعرفة مع أقرانه، ابتكرت القصة التالية لمناقشة كيف كنت سأستخدم برنامج Siemens NX وSimcenter لتسريع عملية التصميم.
الرسوم المتحركة تساعد في اقتباس الوظيفة
أرسل لي أحد مندوبي المبيعات الرسالة التالية:
بدءًا من لوح فارغ، أبدأ في رسم بعض الأفكار في Siemens NX. للتأكد من أن القابض يتحرك بالتوازي مع جوانب الحمولة، سأستخدم قضيبين متوازيين وأدمج ذراع الجرس الذي سيتم تشغيله بواسطة مشغل. يمكن للرسوم المتحركة أن تنقل الأفكار بشكل فعال، مثلما تتحدث الصورة عن ألف كلمة.
في الماضي، كنت سأحتاج إلى إنشاء نماذج ثلاثية الأبعاد لتجميع الآلية جنبًا إلى جنب مع علاقات التجميع الخاصة بها لمحاكاة حركتها. ومع ذلك، الآن يمكنني تحريك الرسومات باستخدام مصمم الرسوم المتحركة NX، يعد تقييم المفاهيم وإجراء دراسات “ماذا لو” قبل النمذجة أسرع وأسهل بكثير. يعد هذا مفيدًا بشكل خاص نظرًا لأن المشروع لا يزال في مرحلة عرض الأسعار ولا نريد استثمار الكثير من الوقت في هذه المرحلة.
حل الحركة المعقدة بسهولة
كيف تتعامل مع هذا الطلب – التعبير اليدوي لقيود التجميع؟ مع هذا النهج، ربما ستقضي الكثير من الوقت مع العديد من التكرارات لتحقيق الحركة المطلوبة.
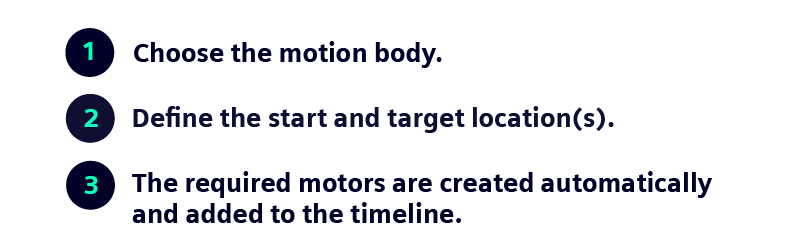
هناك طريقة أفضل، وأحد الأوامر المفضلة لدي هي الكينماتيكا العكسية. إنه سهل الاستخدام بشكل لا يصدق ويمكن أن يوفر الكثير من الوقت. هنا هو سير العمل:
في هذا المثال، قمت بوضع حدود على المفاصل المناسبة لتقليد القيود الجسدية للروبوت وتلقيت المطالبة التالية التي تفيد بأنه لا يمكن الوصول إلى الهدف.
كما هو موضح في الرسم المتحرك أعلاه، لم يتمكن الروبوت من الإمساك بالحمولة بسبب نطاق حركته المحدود وسيكون الحل البسيط هو رفع و/أو تحريك الناقل بعيدًا عن الروبوت. ومع ذلك، فإن ارتفاع الناقل هو متطلب ثابت للعميل، فماذا لو تمكنا من استيعاب الحمولة من الأعلى؟ للتحقق من صحة هذه الفكرة، يتم إجراء تعديل بسيط عن طريق إعادة توجيه ثلاثيات الموقع المستهدف ويتم إعادة حل الحركة في الوقت الفعلي تقريبًا.
يبدو أن هذا التغيير سينجح، لذا سأخبر مندوب المبيعات لدينا بالتحديث.
التعامل بكفاءة مع طلب التغيير
تحدث التغييرات طوال الوقت، وتسهل شركة Siemens NX التعامل معها بكفاءة بفضل بيئتها المتكاملة. لقد تلقيت مخطط طابق جديد من العميل. لقد أضافوا بعض المعدات بالقرب من موقع الالتقاط الخاص بنا، وكنت بحاجة إلى تضمينها في المحاكاة لدينا. للقيام بذلك، استخدمت مربعًا محيطًا لتسليط الضوء على العائق. بالإضافة إلى ذلك، قمت بتنشيط خيار تجنب الاصطدام في أمر Inverse Kinematics. بعد حل مسار الحركة، تمكنت المحاكاة من تجنب العقبة المضافة حديثًا دون أي مشاكل.
ملخص
يعمل نظام Siemen NX على تمكين المصممين من تحريك نماذج المفاهيم بسهولة، والتحقق من صحة الحركة المعقدة، والتعامل مع طلبات التغيير بسهولة.
انضم إلى منتدى المصممين
خبرتك ضرورية للمجتمع. انضم إلينا وساهم بمعرفتك
انضم إلى المنتدى الآنشارك وتعلّم وتقدّم مع أفضل المحترفين في هذا المجال