

انضم إلى منتدى المصممين
خبرتك ضرورية للمجتمع. انضم إلينا وساهم بمعرفتك
انضم إلى المنتدى الآنشارك وتعلّم وتقدّم مع أفضل المحترفين في هذا المجال
يعد مستقبل النقل بجعل الحياة أكثر أمانًا وأكثر تنقلًا للجميع، مع تحقيق نتائج اقتصادية إيجابية. ومع ذلك، لتحقيق هذا الوعد، من الضروري اختبار المركبات الجديدة وكل نظام فرعي من هندستها المعمارية، خاصة وأن الأنظمة الفرعية أصبحت أكثر ذكاءً وتعقيدًا للغاية.
يتطلب التعقيد المتزايد تغييرًا جذريًا في طرق الاختبار ومفاهيم جديدة للتحقق الشامل من المركبات والتحقق من صحتها في كل من العالم المادي والافتراضي، وهو ما يتم تضمينه في اللوائح الجديدة.
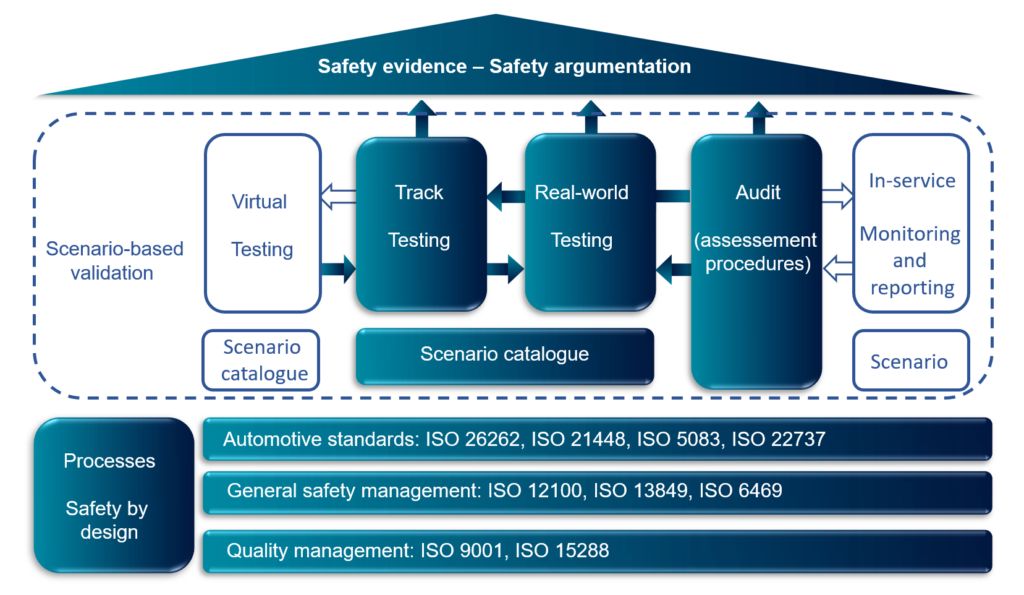
وبهذا المعنى، في فبراير 2021، قدمت لجنة الأمم المتحدة الاقتصادية لأوروبا (UNECE) طريقة التقييم/الاختبار الجديدة للقيادة الآلية (NATM) – وهو إطار يقدم نهجًا متعدد الركائز للتحقق من سلامة القيادة الآلية (انظر رسم بياني 1) ناتم, القواعد الارشادية.
علاوة على ذلك، في أغسطس 2022، اعتمدت مفوضية الاتحاد الأوروبي اللائحة 2022/1426 التي تحدد قواعد تطبيق اللائحة (الاتحاد الأوروبي) 2019/2144 الصادرة عن البرلمان الأوروبي والمجلس فيما يتعلق بالإجراءات الموحدة والمواصفات الفنية للموافقة على النوع. نظام القيادة الآلي (ADS) للمركبات الآلية بالكامل 2144, 1426.
ما هو التحقق من سلامة الأعمدة المتعددة للمركبات AV؟
يحدد التحقق من السلامة متعدد الركائز للمركبات الآلية 5 ركائز اعتماد، والتي تدعم حجج السلامة. بالإضافة إلى الأركان الثلاثة المعروفة (اختبار المسار, اختبار في العالم الحقيقي و مراجعة) ، تذكر اللائحة الاختبار الظاهري و المراقبة أثناء الخدمة.
في هذه المدونة، يتم تعريف/وصف التحقق والمصادقة والشهادة والضمان على النحو التالي:
- تَحَقّق: هو نشاط يحدد ما إذا كان النظام يفي بالمتطلبات، والإجابة على السؤال: “هل بنينا النظام بشكل صحيح؟”
- تصديق: هو تقييم ما إذا كان النظام يلبي احتياجات المستخدم النهائي، والإجابة على السؤال: “هل قمنا ببناء النظام الصحيح”. على الجانب الآخر، التحقق من صحة النموذج هو تقييم مدى تمثيل النموذج للواقع.
- توكيد: هي الثقة المبررة في أن النظام يعمل على النحو المنشود.
- شهادة: يحدد ما إذا كان النظام يتوافق مع مجموعة من المعايير أو المعايير.
وفي حالة المركبات ذاتية القيادة، أدرك المجتمع العلمي في وقت مبكر أن الاختبار في العالم الحقيقي فقط – باستخدام التغطية على أساس عدد الكيلومترات – غير ممكن، من وجهة نظر اقتصادية وفنية.
أحد الأسباب الرئيسية هو أنه خلال اختبارات العالم الحقيقي، نادرًا ما تحدث الأحداث المتعلقة بالسلامة. ولذلك، أصبح من الواضح أن الاختبار الافتراضي سيلعب دورًا رئيسيًا في اعتماد أنظمة القيادة الآلية. يمكن أن تساهم نتيجة الاختبار الافتراضي في حجج السلامة فقط إذا كانت عمليات المحاكاة ذات مصداقية، وسيتم مناقشة ذلك بإيجاز في القسم التالي وسيتم تفصيله في ناتم, القواعد الارشادية.
الاختبار الافتراضي وتقييم مصداقية المحاكاة
في حالة الاختبار الافتراضي، نقوم باستبدال عنصر مادي واحد أو أكثر بنموذج محاكاة.
يمكن للاختبارات الافتراضية المستخدمة للتحقق من صحة أنظمة القيادة الآلية (ADS) تحقيق أهداف مختلفة، اعتمادًا على استراتيجية التحقق الشاملة ودقة نماذج المحاكاة الأساسية.
بعض الأهداف يمكن أن تكون:
- توفير الثقة النوعية أو الإحصائية في سلامة النظام بأكمله.
- توفير ثقة نوعية أو إحصائية في أداء أنظمة فرعية/مكونات محددة.
- اكتشف السيناريوهات الصعبة لاختبارها في العالم الحقيقي (مثل اختبارات العالم الحقيقي واختبارات المسار).
وعلى النقيض من جميع فوائده المحتملة، فإن أحد القيود على هذا النهج يكمن في إخلاصه المحدود للنماذج. نظرًا لأن النماذج لا يمكنها سوى تقديم تمثيل تقريبي للواقع، فإن مدى ملاءمة النموذج ليحل محل العالم الحقيقي بشكل مُرضٍ للتحقق من سلامة إعلانات الإعلانات يجب تقييمها بعناية.
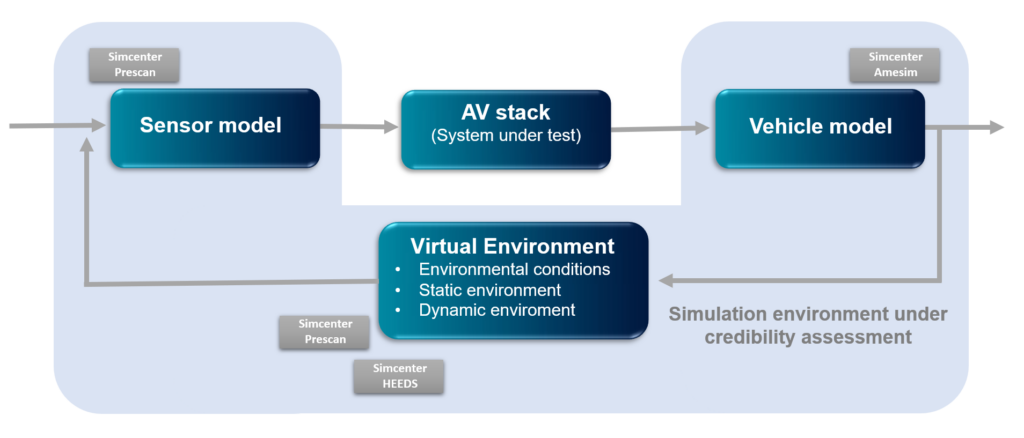
ولذلك، يجب تقييم مصداقية نماذج المحاكاة وبيئة المحاكاة الموضحة في الشكل 2 لتحديد قابلية نقل النتائج وموثوقيتها مقارنة بالأداء الواقعي.
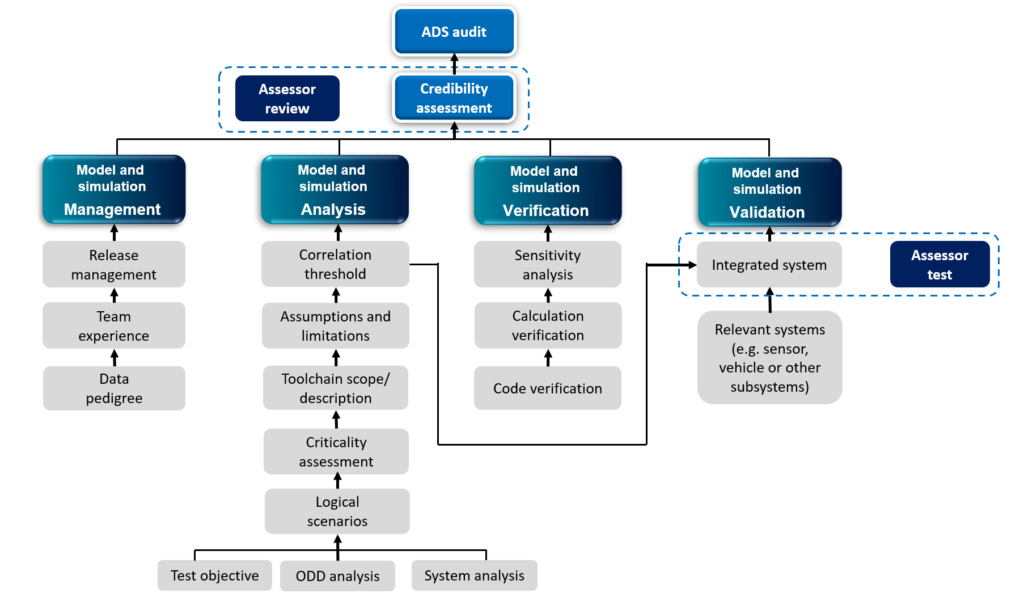
بالإضافة إلى نماذج المحاكاة وبيئة المحاكاة، يمتد تقييم المصداقية ليشمل إدارة النماذج والمحاكاة أيضًا. يتم التقاط كل هذه الجوانب في الشكل 3.
اقرأ ورقة سيمنز البيضاء
لمعرفة المزيد حول سير عمل تطوير المركبات ذاتية القيادة، اقرأ هذا ورق ابيض، الذي يصف بمزيد من التفاصيل:
- التحديات المتعلقة بتطوير AV
- سير عمل هندسة المركبات
- الاختبار القائم على السيناريو للمركبات ذاتية القيادة وسير عمل الاختبار القائم على السيناريو
- سير عمل تقييم مصداقية المحاكاة
الأنشطة الجارية واللوائح ذات الصلة
ابتداءً من أكتوبر 2022، ردو (هيئة المركبات الهولندية)، جي آر سي (مركز الأبحاث المشترك التابع للمفوضية الأوروبية) وشركة Siemens Industry Software Dutch BV، عملا معًا بشكل وثيق لفهم كيفية تفسير اللائحة الجديدة وكيفية تطبيقها، وخاصة كيفية تطبيق إطار تقييم المصداقية.
للحصول على فهم أفضل، تم النظر في حالة استخدام محددة (خدمة صف السيارات الآلية) وتم تطبيق كل خطوة من إطار تقييم مصداقية المحاكاة على حالة الاستخدام هذه.
تم تلخيص نتائج هذه التحقيقات في دليل تقييم المصداقية، والذي يمكن استخدامه كمبدأ توجيهي من قبل مصنعي المعدات الأصلية للسيارات، المهتمين باستخدام الاختبار الافتراضي كركيزة لإصدار الشهادات.
وأخيرًا، بالنسبة للقارئ المهتم، يتوفر ملخص للمعايير والروابط ذات الصلة في الجداول أدناه.
لائحة اللجنة الاقتصادية لأوروبا التابعة للأمم المتحدة:
| رقم اللائحة | اسم اللائحة | غاية |
| اتفاقية 1958 | ECE/TRANS/WP.29/2016/2 | اتفاق بشأن اعتماد لوائح الأمم المتحدة التقنية المنسقة بشأن المركبات ذات العجلات والمعدات والأجزاء التي يمكن تركيبها و/أو استخدامها على المركبات ذات العجلات وشروط الاعتراف المتبادل بالموافقات الممنوحة على أساس لوائح الأمم المتحدة هذه |
| 155 ريال | E/ECE/TRANS/505/Rev.3/Add.154 | أحكام موحدة تتعلق بالموافقة على المركبات فيما يتعلق بالأمن السيبراني ونظام إدارة الأمن السيبراني |
| R156 | ECE/TRANS/WP.29/2020/80 | أحكام موحدة تتعلق بالموافقة على المركبات فيما يتعلق بتحديث البرامج ونظام إدارة تحديثات البرامج |
| R157 | ECE/TRANS/WP.29/2020/81 | أحكام موحدة بشأن الموافقة على المركبات فيما يتعلق بأنظمة الحفاظ على المسار الآلي |
| ناتم | ECE/TRANS/WP.29/2021/61 | طريقة التقييم/الاختبار الجديدة لإرشادات القيادة الآلية (NATM) للتحقق من صحة نظام القيادة الآلي (ADS) |
| القواعد الارشادية | ECE/TRANS/WP.29-187-10/2022 | إرشادات وتوصيات بشأن متطلبات السلامة لأنظمة القيادة الآلية |
تنظيم الاتحاد الأوروبي:
| رقم اللائحة | اسم اللائحة | غاية |
| 858 | لائحة (الاتحاد الأوروبي) 2018/858 الصادرة عن البرلمان الأوروبي والمجلس | الموافقة النوعية ومراقبة السوق للمركبات الآلية ومقطوراتها والأنظمة والمكونات والوحدات الفنية المنفصلة المخصصة لهذه المركبة |
| 2144 | لائحة (الاتحاد الأوروبي) 2019/2144 للبرلمان الأوروبي والمجلس | متطلبات الموافقة النوعية للمركبات الآلية ومقطوراتها والأنظمة والمكونات والوحدات الفنية المنفصلة المخصصة لهذه المركبات، فيما يتعلق بسلامتها العامة وحماية ركاب المركبة ومستخدمي الطريق المعرضين للخطر |
| 168 | لائحة (الاتحاد الأوروبي) رقم 168/2013 الصادرة عن البرلمان الأوروبي والمجلس | الموافقة ومراقبة السوق للمركبات ذات العجلتين أو الثلاث عجلات والدراجات الرباعية |
| 1426 | اللائحة التنفيذية للمفوضية (الاتحاد الأوروبي) 1426/2022 | وضع قواعد لتطبيق اللائحة (الاتحاد الأوروبي) 2019/2144 للبرلمان الأوروبي والمجلس فيما يتعلق بالإجراءات الموحدة والمواصفات الفنية للموافقة على نوع نظام القيادة الآلي (ADS) للمركبات الآلية بالكامل |
مشاركة سيمنز في مشاريع الاتحاد الأوروبي
بالإضافة إلى الأنشطة البحثية المستمرة التي تقودها Siemens وRDW وJRC بشأن النهج متعدد الركائز للتحقق من سلامة المركبات الآلية، تشارك Siemens في مشاريع الاتحاد الأوروبي التالية:
- فوسيتا (فوundations ل جمستمر ههندسة تجدير بالثقة أالاستقلال الذاتي)
التقارب بين الهندسة القائمة على البيانات والهندسة القائمة على النماذج. الإنجاز العلمي الأساسي المستهدف لـ فوسيتا يكمن في التقارب بين النهج القائم على النماذج والبيانات. ومما يزيد من تعقيد هذا التقارب الحاجة إلى تطبيق التحقق والتحقق بشكل تدريجي وتجنب جهود إعادة التحقق وإعادة التحقق الكاملة. - أثينا (المشروع الممول من الاتحاد الأوروبي رقم 101076754). أثينا هو مشروع بحث وابتكار حول جمتصل و جعملية أالآلي محلول القدرة (CCAM) التي تهدف إلى بناء تقنيات CCAM جديرة بالثقة وقابلة للتفسير وخاضعة للمساءلة.
- UrbanSmartPark (المشروع الأول ضمن “KIC التنقل الحضري“، مبادرة أوروبية يدعمها EIT، المعهد الأوروبي للابتكار والتكنولوجيا). UrbanSmartPark يركز المشروع على تطوير مواقف السيارات الآلية في الشارع داخل المدينة مما يوفر مجموعة واسعة من الخدمات المحتملة المتعلقة بمواقف السيارات. اقرا هذا مدونة لمعرفة المزيد.
- شروق الشمس (شركة هورايزون لأعمال البحث والابتكار رقم المشروع 101069573 اتصل بـ HORIZON-CL5-2021-D6-01). ال شروق الشمس يهدف المشروع إلى إنشاء إطار مشترك لضمان السلامة، والربط بين الصوامع وجعلها تتعاون بطريقة متناغمة.
- ديتم (دigtal أناالبنية التحتية لإثبات المستقبل مالقدرة، البرنامج الممول من NextGenerationEU). بهدف دعم أنظمة القيادة الآلية، فإن ديتم يقوم الشركاء بتطوير بنية نظام للبنية التحتية الرقمية، بما في ذلك التقنيات الأساسية المهمة المرتبطة بالتوطين وخدمات المرور والخرائط الرقمية والبنية التحتية للشحن والتحقق المستمر من السلامة.
لمعرفة المزيد عن المشروع، اتصل بـ Alexandru Forrai ([email protected])، دكتوراه، مهندس زميل ومستشار في شركة Siemens Digital Industries Software.
انضم إلى منتدى المصممين
خبرتك ضرورية للمجتمع. انضم إلينا وساهم بمعرفتك
انضم إلى المنتدى الآنشارك وتعلّم وتقدّم مع أفضل المحترفين في هذا المجال