

未来的交通有望让每个人的生活更加安全、更加便捷,并带来积极的经济成果。 然而,为了实现这一承诺,有必要测试新车及其架构的每个子系统,特别是当子系统变得更加智能和高度复杂时。
复杂性的增加需要彻底改变测试方法和新概念,以在物理和虚拟世界中进行全面的车辆验证和验证,这在新法规中得到了体现。
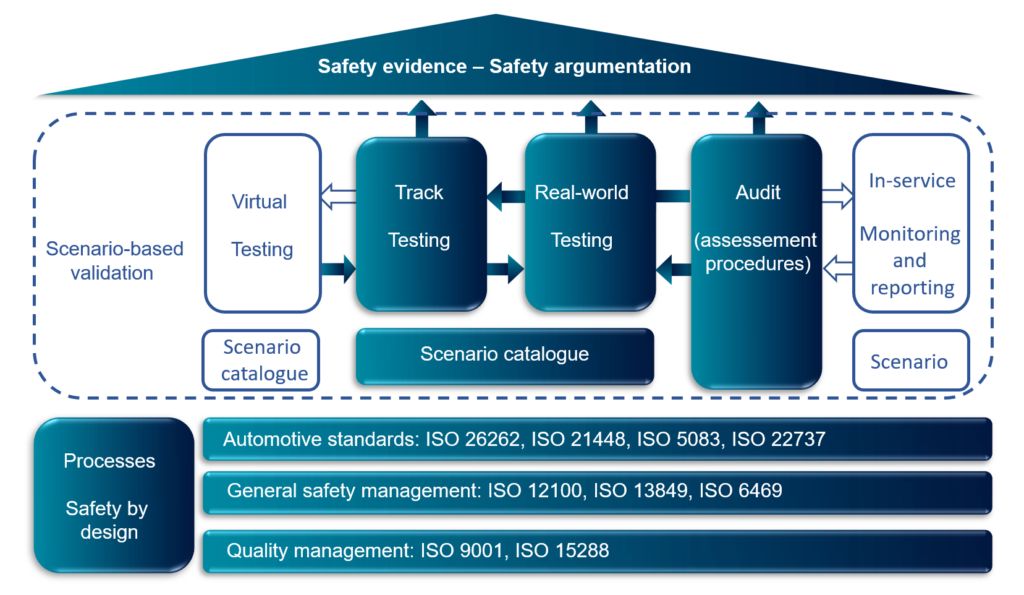
从这个意义上说,2021 年 2 月,UNECE(联合国欧洲经济委员会)提出了自动驾驶新评估/测试方法(NATM)——一个框架,引入了自动驾驶安全验证的多支柱方法(参见图。1) 新奥法, 指南。
此外,欧盟委员会于 2022 年 8 月通过了第 2022/1426 号条例,规定了欧洲议会和理事会第 2019/2144 号条例 (EU) 的适用规则,涉及型式认证的统一程序和技术规范全自动车辆的自动驾驶系统(ADS) 2144, 1426。
什么是AV的多支柱安全验证?
自动驾驶汽车的多支柱安全验证指定了 5 个认证支柱,支持安全论证。 除了众所周知的三大支柱(跟踪测试, 真实世界的测试 和 审计),规定中提到 虚拟测试 和 运行中监控。
在本博客中,验证、确认、认证和保证的定义/描述如下:
- 确认:是一项确定系统是否满足要求的活动,回答以下问题:“我们构建的系统正确吗?”
- 验证:正在评估系统是否满足最终用户的需求,回答以下问题:“我们是否构建了正确的系统”。 另一方面, 模型验证 正在评估模型代表现实的程度。
- 保证:有理由相信系统按预期运行。
- 认证:确定系统是否符合一组准则或标准。
就自动驾驶汽车而言,科学界很早就意识到,从经济和技术的角度来看,仅使用基于里程的覆盖范围进行实际测试是不可行的。
主要原因之一是在现实世界的测试中,与安全相关的事件很少发生。 由此可见,虚拟测试将在自动驾驶系统的认证中发挥关键作用。 当且仅当模拟可信时,虚拟测试的结果才能有助于安全论证,这将在下一节中简要讨论,并在 新奥法, 指南。
虚拟测试与仿真可信度评估
在虚拟测试中,我们用模拟模型替换一个或多个物理元素。
用于自动驾驶系统(ADS)验证的虚拟测试可以实现不同的目标,具体取决于总体验证策略和底层仿真模型的准确性。
一些目标可能是:
- 为整个系统的安全性提供定性或统计信心。
- 提供对特定子系统/组件性能的定性或统计信心。
- 发现在现实世界中进行测试的具有挑战性的场景(例如现实世界测试和跟踪测试)。
与它的所有潜在好处相比,这种方法的局限性在于其模型固有的有限保真度。 由于模型只能提供现实的粗略表示,因此需要仔细评估模型是否适合替代现实世界来验证 ADS 的安全性。
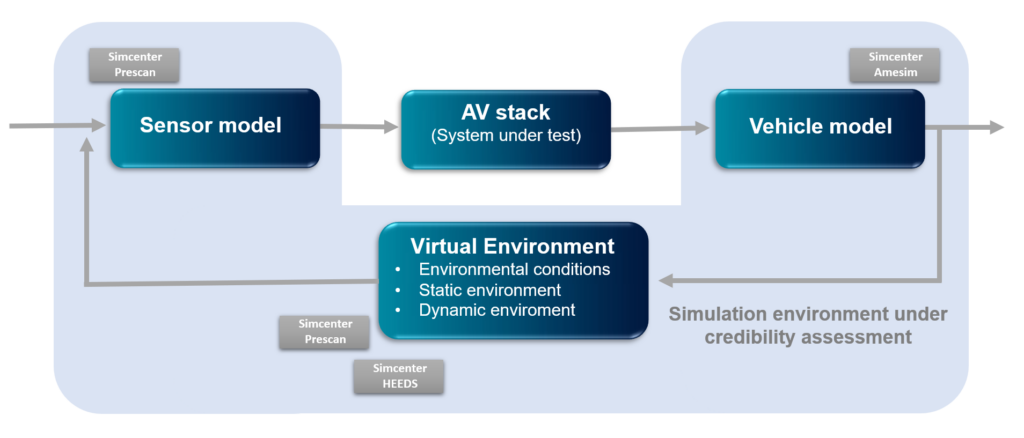
因此,应评估图2所示的仿真模型和仿真环境的可信度,以确定结果与实际性能相比的可转移性和可靠性。
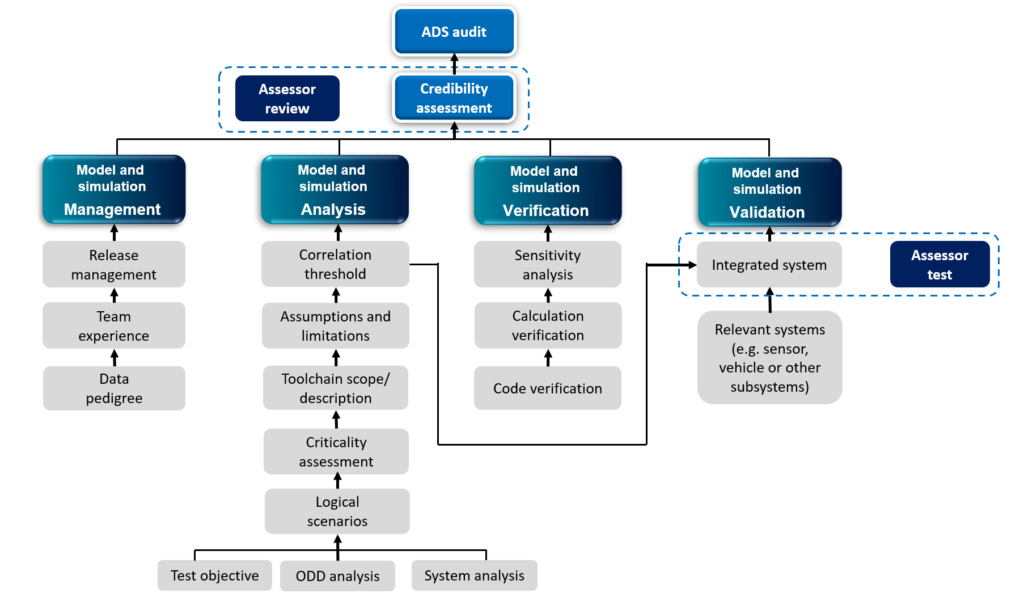
除了仿真模型和仿真环境之外,可信度评估还延伸到模型和仿真管理。 所有这些方面都在图 3 中得到体现。
阅读西门子白皮书
要了解有关自动驾驶汽车开发工作流程的更多信息,请阅读此内容 白皮书,更详细地描述:
- AV 开发相关的挑战
- 车辆工程工作流程
- 自动驾驶汽车场景化测试及场景化测试工作流程
- 模拟可信度评估工作流程
正在进行的活动和相关规定
从2022年10月开始, RDW (荷兰车辆管理局), 日本研究委员会 (欧盟委员会联合研究中心)与西门子工业软件荷兰公司密切合作,了解如何解释和如何应用新法规,特别是如何应用可信度评估框架。
为了更好地理解,考虑了一个特定的用例(自动代客泊车),并且模拟可信度评估框架的每个步骤都已应用于该用例。
这些调查的结果已总结在可信度评估手册中,有兴趣使用虚拟测试作为认证支柱的汽车原始设备制造商可以将其用作指南。
最后,下表为感兴趣的读者提供了相关标准和链接的摘要。
联合国欧洲经济委员会法规:
| 法规编号 | 法规名称 | 目的 |
| 1958年协议 | ECE/TRANS/WP.29/2016/2 | 关于采用联合国关于轮式车辆、轮式车辆上安装和/或使用的设备和零件的统一技术条例以及相互承认根据这些联合国条例批准的条件的协定 |
| R155 | E/ECE/TRANS/505/Rev.3/Add.154 | 车辆网络安全审批统一规定及网络安全管理体系 |
| R156 | ECE/TRANS/WP.29/2020/80 | 车辆软件更新审批统一规定及软件更新管理制度 |
| R157 | ECE/TRANS/WP.29/2020/81 | 关于自动车道保持系统车辆批准的统一规定 |
| 新奥法 | ECE/TRANS/WP.29/2021/61 | 自动驾驶新评估/测试方法(NATM)验证自动驾驶系统(ADS)指南 |
| 指南 | ECE/TRANS/WP.29-187-10/2022 | 有关自动驾驶系统安全要求的指南和建议 |
欧盟法规:
| 法规编号 | 法规名称 | 目的 |
| 第858章 | 欧洲议会和理事会 (EU) 2018/858 号条例 | 机动车辆及其拖车以及用于此类车辆的系统、组件和单独技术单元的型式核准和市场监督 |
| 2144 | 欧洲议会和理事会 (EU) 2019/2144 号条例 | 机动车辆及其拖车以及用于此类车辆的系统、部件和单独技术单元的型式核准要求,涉及其一般安全以及对车辆乘员和弱势道路使用者的保护 |
| 168 | 欧洲议会和理事会 (EU) 第 168/2013 号条例 | 两轮或三轮车辆和四轮车的审批和市场监督 |
| 1426 | 委员会实施条例(欧盟)2022/1426 | 制定欧洲议会和理事会法规 (EU) 2019/2144 的适用规则,涉及全自动车辆自动驾驶系统 (ADS) 型式认证的统一程序和技术规范 |
西门子参与欧盟项目
除了由西门子、RDW 和 JRC 领导的正在进行的自动车辆安全验证多支柱方法的研究活动外,西门子还参与了以下欧盟项目:
- 福塞塔 (FO基金 C连续的 乙工程化 时间防锈的 A自主性)
数据驱动和基于模型的工程的融合。 潜在的有针对性的科学突破 福塞塔 关键在于模型驱动和数据驱动方法的融合。 由于需要逐步应用验证和确认并避免完全的重新验证和重新验证工作,这种融合变得更加复杂。 - 艾西娜 (欧盟资助的项目号101076754)。 艾西娜 是一个研究和创新项目 C连接和 C合作的 A自动化的 中号移动性 (CCAM) 解决方案,旨在构建值得信赖、可解释且负责任的 CCAM 技术。
- 城市智慧公园 (“中的第一个项目”KIC城市交通“,一项由欧洲创新技术研究所 (EIT) 支持的欧洲倡议)。 城市智慧公园 该项目的重点是开发城市内街道上的自动化停车系统,提供广泛的停车相关服务。 读这个 博客 了解更多。
- 日出 (地平线研究与创新行动,项目编号101069573,致电HORIZON-CL5-2021-D6-01)。 这 日出 该项目旨在建立一个共同的安全保证框架,将各个孤岛相互连接起来,并使它们以协调的方式进行协作。
- DITM (D数字化的 我面向未来的基础设施 中号流动性,下一代欧盟资助的计划)。 旨在支持自动驾驶系统, DITM 合作伙伴正在开发数字基础设施的系统架构,包括与本地化、交通服务、数字地图、充电基础设施和持续安全验证相关的关键核心技术。
如需了解有关该项目的更多信息,请联系 Alexandru Forrai ([email protected]) 博士、Siemens Digital Industries Software 工程师兼顾问。