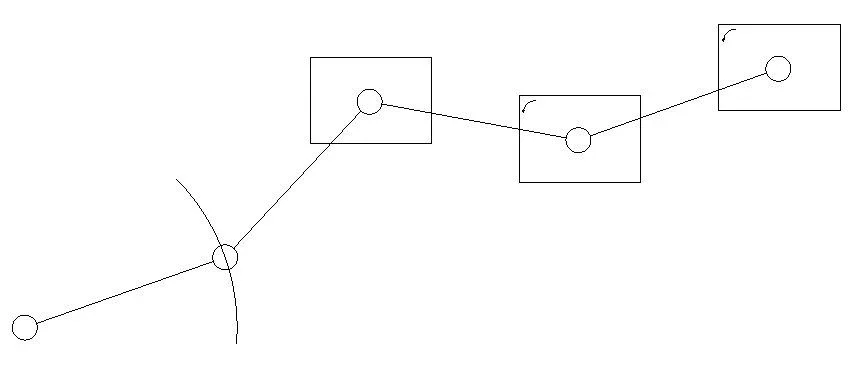
der Parallelroboter ist so genannt, weil er nicht von einem echten „Kette“-Kinotisch gebildet wird. die Gelenke sind nicht in Serie, hintereinander, sondern parallel.
der weiße Flexpicker hat vier rotierende Gelenke. die ersten drei in Serie bewegen drei Hebel und ermöglichen die Positionierung des Endpunktes. das vierte mittels eines homokinetischen Gelenks die Drehung des Werkzeugs um eine vertikale Achse ermöglicht. der gelbe Roboter hat stattdessen die drei parallelen Gelenke durch Linearantriebe ersetzt (aber im Konzept ändert sich nichts), und am Ende ist ein kugelförmiges Handgelenk montiert, das das System auf sechs gdm macht.
Aber wir reden über das Handgelenk. der Name einer filmischen Kette wird ausschließlich durch die Art und Positionierung der ersten drei Gelenke gegeben. Alles, was später kommt, ist Teil des Handgelenks. in diesem und in früheren Beiträgen Ich machte eine kleine Ausnahme für Vier-Gdm-Roboter, denn ich fühle mich nicht wie ich "polso" die einzige vierte Drehachse definieren.
Daher wird der Parallelroboter üblicherweise für Pick&place-Aufgaben verwendet. Es ist etwas komplexer als der Abfall, es hat keine Ausbeute in Vorzugsrichtungen, es kann einen Arbeitsraum größer als ein Abfall ohne zu viel Gewicht haben.
die Haupteigenschaften von parallelen Robotern sind die große Steifigkeit und hohe Geschwindigkeit. Die Steifigkeit wird durch die Struktur gegeben, da die Arme geschlossene Bauringe bilden, während die hohe Geschwindigkeit durch die Tatsache gegeben ist, dass jedes Gelenk als parallele filmische Struktur einen Arm bewegen muss. in allen Filmketten der Serie muss jedoch jedes Gelenk alle Waffen, Motoren und Getriebe der Gelenke bewegen, die ihm folgen.
Diese Art von Roboter ist weit verbreitet in canning Pflanzen, vor allem Lebensmittel.
in diesen Videos sehen Sie etwas:
http://www.youtube.com/watch?v=0-kpv-zocky&feature= related
http://www.youtube.com/watch?v=adlmxmxlry8
http://www.youtube.com/watch?v=vxz5n2tnqou&feature= related ")
Insbesondere wird das sogenannte "Tracking" des Materials bemerkt. eine Kamera beobachtet die chaotische Anordnung der Stücke auf dem Band, nimmt ein Foto in einem bestimmten Moment der Zeit. die Aufgabe ist in Bezug auf:
- Position und Orientierung des Stückes zu nehmen
- Position und Orientierung des Ortes, an dem es abgelagert werden soll (zum Beispiel, um die Creme Croissants von denen zu Marmelade zu teilen)
- Durchführbarkeit der Operation (oft werden mehr Roboter online gestellt. wenn es zu einem bestimmten Moment zu viele Stücke zu verarbeiten gibt und der erste Roboter weiß nicht rechtzeitig zu tun, melden Sie sich an die nächsten, die ihn verlassen werden, und so weiter)
an diesem Punkt wird das "Kopito" programmiert, als ob das Band noch war. wird dem Controller die Struktur der Aufgabe und die Geschwindigkeit des Bandes übergeben, und dies wird die Aufgabe ausführen, die Geschwindigkeit des Bandes zu der der ursprünglichen Aufgabe hinzufügen. eine natürliche Verfolgung (Tracking) des Bandes, das für den Bediener völlig transparent ist. Sie bemerken vor allem in der ersten der Videos oben.
das Potenzial dieses Roboters ist groß, obwohl seine Anwendungen ziemlich begrenzt sind. Insbesondere können Sie die Delikatesse sehen, mit der die Brioches manipuliert werden, und anstatt die Geschwindigkeit der leeren Renditen (siehe Ausmaß des Rennens). Kekse werden in der Regel mit viel weniger Kautele manipuliert, Schokoladen sind stattdessen ein Mittelweg.
bei der Suche nach einer Schokoladenboxanlage (auf der Tube habe ich keine signifikanten gefunden) bemerken Sie eine interessante Sache. Geschwindigkeit ist ziemlich erhalten, plötzlich fallen die Beschleunigungen, um bestimmte Stücke zu manipulieren, ohne irgendwelchen offensichtlichen Grund. das sind die Likörschokolade, wenn die Beschleunigungen zu hoch wären, würde der Likör die Schokolade verbrennen und entkommen. Darüber hinaus muss eine vertikale Beschleunigung einem energetischen Griff entsprechen, sonst rutscht das Stück, und Schokoladen zum Likör kann es nicht leisten.
Eine andere Art von Parallelroboter ist die sogenannte "Esapode", nicht zu verwechseln mit anderen Hexapoden, die mit sechs Beinen gehen. ein Sechs-Gdm-System mit allen Linearaktoren und alle parallel. Ich glaube, es ist die einzige filmische Struktur, die zwar keinen Puls hat, eine Aufgabe bei sechs Freiheitsgraden ausführen kann.
Mit seinem extrem reduzierten Arbeitsraum hat dieser extrem starre Manipulator keine Pick&place-Aufgaben, bei denen 4 gdl mehr als genug sind. wird vor allem in der Realisationsform "Stewart-Plattform" als Positionsgeber verwendet. hat tatsächlich die Eigenschaft, ein Objekt in den Raum mit sehr hohen Genauigkeiten auf sechs gdl zu platzieren. dient zur Ausrichtung der Optik, für mikrochirurgische Operationen, für Inspektionen, zur Bedingung der Krümmung der Teleskopspiegel, zur Ausrichtung der Reflektoren in Funkteleskopen usw.
 bei 8 Jahren ist bemerkenswert!
bei 8 Jahren ist bemerkenswert!