Taipan95
Guest
Guten Morgen.
Ich versuche, mein Wissen über die Antriebe Elektromotor + Reduzierer (+ Inverter, in diesem Fall).
Ich möchte versuchen, einen dreiphasigen Asynchronmotor zu formen, mit Inverter eingestellt zu werden, eine Fallstudie "kopieren" zu versuchen, die ich bei einem Trainingskurs sah, aber wo es mit dem System bereits dimensioniert beginnt und dann auf andere Aspekte (insbesondere auf Reaktionskräfte auf den Lagern des Handgriffs) konzentrieren.
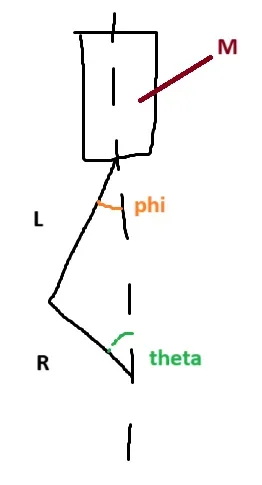
das System ist ein Biella Griff, mit der Biella, die mit einer festen Last von 20kg verbunden ist.
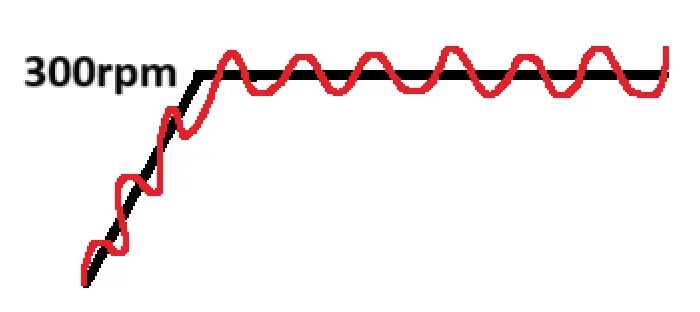
die Kurbel muss nach 2,5s auf die Geschwindigkeit des Regimes (300rpm) mit einer Rampe zum Vergnügen (ich habe eine lineare Rampe von 0s auf 2,5s für die Einfachheit betrachtet).
die Kurbel ist 175mm, die Biella ist 519mm.
Wir geben zu, dass dies alle Ausgangsdaten sind.
Ich sage Ihnen, dass bei der Fallstudie auch ein Motor zwischen Kurbelwelle und Asynchronmotor mit einem Verhältnis von etwa 3 eingesetzt wird. Aber ich schätze, das kommt später.
um den dreiphasigen Asynchronmotor wählen zu können, muss ich wohl das Drehmomentprofil berechnen, das benötigt wird, um dieses System mit den gewünschten Takten und Geschwindigkeiten zu bewegen. Dies sollte mir zumindest eine Größenordnung auf die Größe des Motors zu verwenden geben. Danach sollten sie den Überlegungen an den Wechselrichter und an den Reduzierer folgen.
das Problem ist, dass ich in diesem Fall eine sinusförmige Belastung habe, weil die Masse von 20kg die Wechselbewegung vertikal nach dem Fahrrad der biella-manovella bewegen wird.
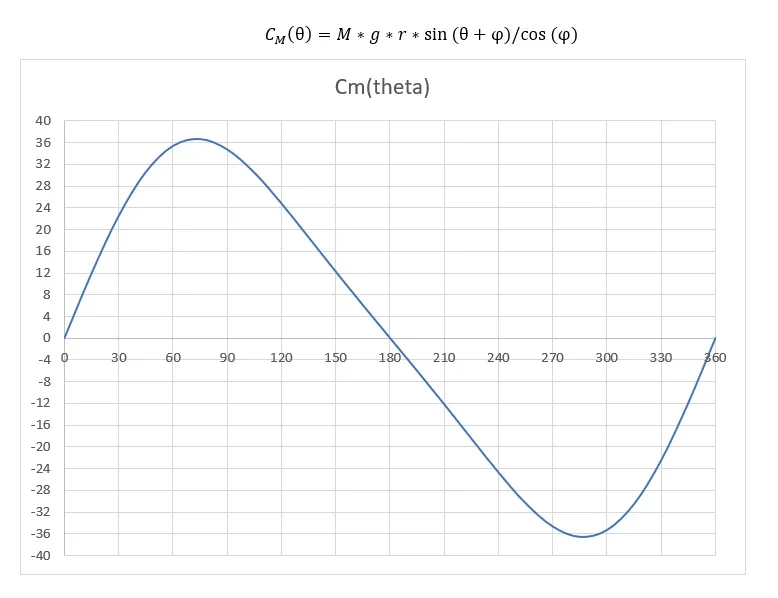
Ich versuchte, das notwendige Drehmomentprofil bei 300 U/min zu berechnen, für eine Kurbelsäule, und ich stecke es zusammen mit einer Box, die das System zeigt. Ich glaube jedoch nicht, dass es richtig ist, denn es berücksichtigt nicht das Vorhandensein des Wechselrichters und wird auch nur für die Geschwindigkeit des Regimes durchgeführt, ohne den Transitor zu betrachten.
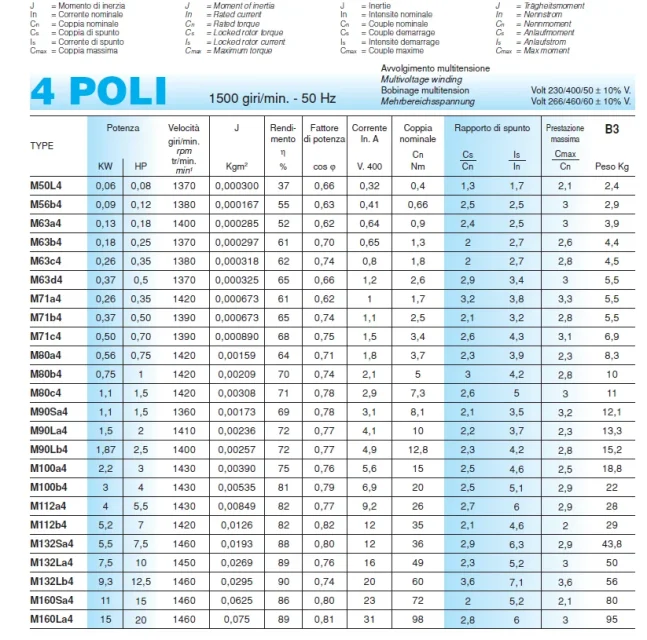
Ich weiß nicht wirklich, wo ich anfangen soll, ich möchte jemanden mit etwas Geduld, um mich dazu führen zu können, wie man alles... Ich schaffte es, die Motor-Kataloge und Getriebe in der Fallstudie verwendet zu finden, ich auch diese.
der gewählte Motor ist: m90sa4
der gewählte Reduzierer ist: 411a ein Schritt 38nm
Dank an alle, die einen Beitrag leisten möchten
Ich versuche, mein Wissen über die Antriebe Elektromotor + Reduzierer (+ Inverter, in diesem Fall).
Ich möchte versuchen, einen dreiphasigen Asynchronmotor zu formen, mit Inverter eingestellt zu werden, eine Fallstudie "kopieren" zu versuchen, die ich bei einem Trainingskurs sah, aber wo es mit dem System bereits dimensioniert beginnt und dann auf andere Aspekte (insbesondere auf Reaktionskräfte auf den Lagern des Handgriffs) konzentrieren.
das System ist ein Biella Griff, mit der Biella, die mit einer festen Last von 20kg verbunden ist.
die Kurbel muss nach 2,5s auf die Geschwindigkeit des Regimes (300rpm) mit einer Rampe zum Vergnügen (ich habe eine lineare Rampe von 0s auf 2,5s für die Einfachheit betrachtet).
die Kurbel ist 175mm, die Biella ist 519mm.
Wir geben zu, dass dies alle Ausgangsdaten sind.
Ich sage Ihnen, dass bei der Fallstudie auch ein Motor zwischen Kurbelwelle und Asynchronmotor mit einem Verhältnis von etwa 3 eingesetzt wird. Aber ich schätze, das kommt später.
um den dreiphasigen Asynchronmotor wählen zu können, muss ich wohl das Drehmomentprofil berechnen, das benötigt wird, um dieses System mit den gewünschten Takten und Geschwindigkeiten zu bewegen. Dies sollte mir zumindest eine Größenordnung auf die Größe des Motors zu verwenden geben. Danach sollten sie den Überlegungen an den Wechselrichter und an den Reduzierer folgen.
das Problem ist, dass ich in diesem Fall eine sinusförmige Belastung habe, weil die Masse von 20kg die Wechselbewegung vertikal nach dem Fahrrad der biella-manovella bewegen wird.
Ich versuchte, das notwendige Drehmomentprofil bei 300 U/min zu berechnen, für eine Kurbelsäule, und ich stecke es zusammen mit einer Box, die das System zeigt. Ich glaube jedoch nicht, dass es richtig ist, denn es berücksichtigt nicht das Vorhandensein des Wechselrichters und wird auch nur für die Geschwindigkeit des Regimes durchgeführt, ohne den Transitor zu betrachten.
Ich weiß nicht wirklich, wo ich anfangen soll, ich möchte jemanden mit etwas Geduld, um mich dazu führen zu können, wie man alles... Ich schaffte es, die Motor-Kataloge und Getriebe in der Fallstudie verwendet zu finden, ich auch diese.
der gewählte Motor ist: m90sa4
der gewählte Reduzierer ist: 411a ein Schritt 38nm
Dank an alle, die einen Beitrag leisten möchten