meccanicamg
Guest
hier ist ein Ansatz, um das Drehmoment an der Kurbel Ihres Biella-Manovella-Mechanismus zu berechnen:
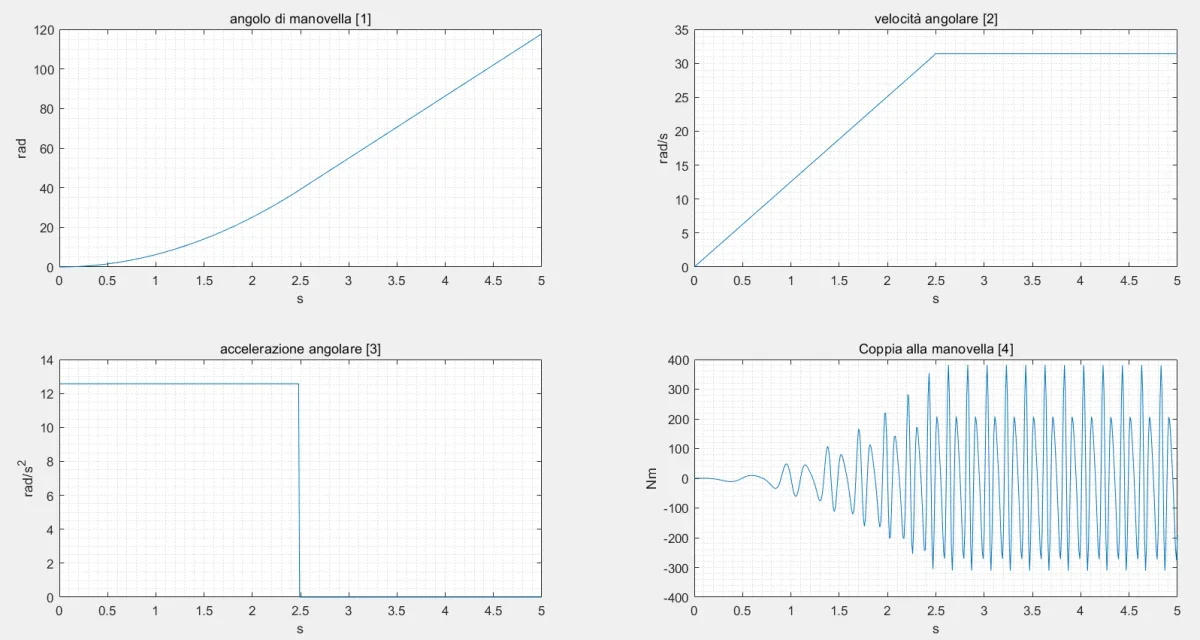
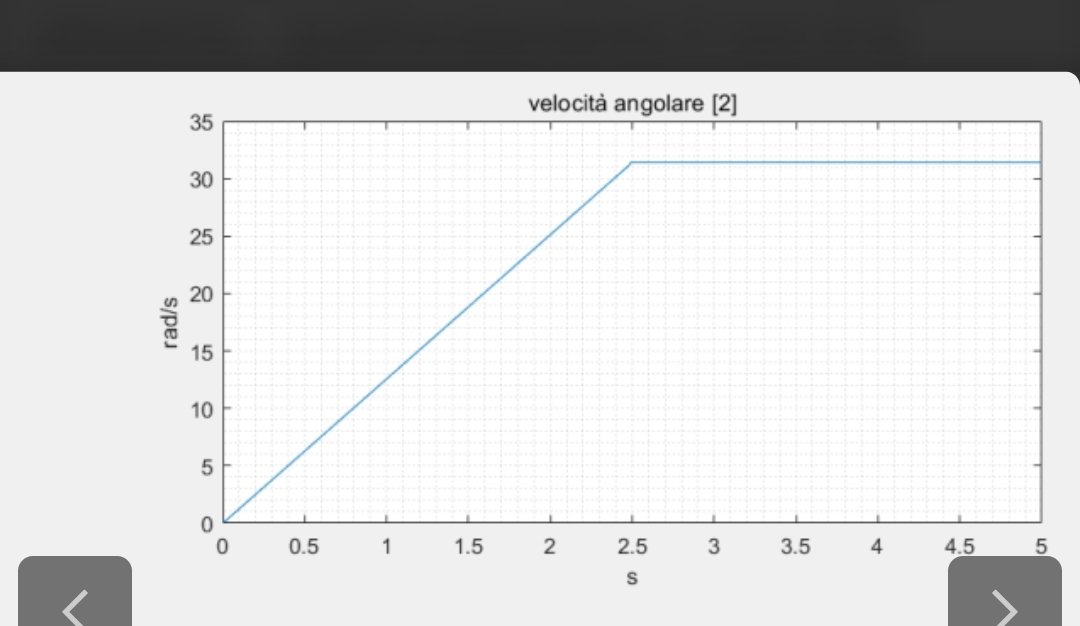
1. Berechnung der Winkelbeschleunigung:* Umwandlung von Windungen pro Minute zu Strahlung pro Sekunde: 1 min/60 s ≈ 31,42 rad/s
* Berechnung der Winkelbeschleunigung: α = ω / t = 31.42 rad/s / 2.5 s ≈ 12.57 rad/s2
2. Kraftberechnung auf den Kolben:* Bestimmung der zur Beschleunigung der Masse erforderlichen Kraft: f = m
* Berechnung der Linearbeschleunigung des Kolbens: Dies ist ein komplexerer Teil, da die Beschleunigung des Kolbens während der Drehung der Kurbel variiert. für eine ungefähre Schätzung können Sie die maximale Beschleunigung des Kolbens betrachten, die auftritt, wenn die Kurbel senkrecht zur Biella ist. Sie können eine detailliertere Filmanalyse für eine genauere Berechnung verwenden.
3. Berechnung der Tangentialkraft am Handgriff:* Verwendung des Übersetzungsverhältnisses: Die Kraft auf den Kolben wird durch die Biella auf die Kurbel übertragen. das Übersetzungsverhältnis zwischen der Kraft auf den Kolben und der Tangentialkraft auf den Handgriff hängt von der Geometrie des Mechanismus (Länge der Biella und des Griffbalkens) ab.
* Tangentiale Kraftberechnung: f_tangenziale = f_pistone * (r_manovella / l_biella)
4. Berechnung des Drehmoments zum Handgriff:* Drehmomentdefinition: Das Paar ist das Produkt der Tangentialkraft für den Kurbelradius.
* Drehmomentberechnung: τ =
zusammenfassende Formeln:
* ω = 2πn / 60
*
* f = m * a
* f_tangenziale = f_pistone * (r_manovella / l_biella)
* τ = f_tangen * r_manovella
Kommentare:
* Näherung: Diese Berechnung liefert eine ungefähre Schätzung des Paares. für ein genaueres Ergebnis ist es erforderlich, die vollständige kinematische Analyse des Biella-Manovella-Mechanismus unter Berücksichtigung der Veränderung der Beschleunigung des Kolbens bei der Drehung der Kurbel zu berücksichtigen.
* Andere Faktoren: Andere Faktoren wie Reibung, Biellamasse und Verluste im Mechanismus können das tatsächliche Drehmoment beeinflussen.
Eine genaue Berechnung der Beschleunigung des Kolbens in einem Biella-Manovella-Mechanismus erfordert eine eingehendere Analyse der Kinematik.
Formeln und Erwägungen:zur Ermittlung der Beschleunigung des Kolbens zu jedem Zeitpunkt ist es erforderlich, die Geometrie des Mechanismus und die Winkelgeschwindigkeit des Handgriffs zu berücksichtigen.* Kolbenstellung:
die Lage des Kolbens (s) gegenüber dem oberen Totpunkt kann nach dem Drehwinkel der Kurbel (θ) und den Längen der Biella (l) und der Kurbel (r) ausgedrückt werden:
(cos(θ) + √(l2 - r2sin2(θ)))
* Kolbengeschwindigkeit:
die Position im Vergleich zur Zeit ermittelt, erhalten Sie die Kolbengeschwindigkeit:
v = ds/dt = ω * r * (sin(θ) + (r * sin(θ) * cos(θ) / √(l2 - r2sin2(θ)))
wobei ω die Winkelgeschwindigkeit der Kurbel ist.
* Kolbenbeschleunigung:
weiter die Geschwindigkeit im Vergleich zur Zeit, erhalten Sie die Beschleunigung des Kolbens:
a = dv/dt = ω2 * r * (cos(θ) + (r * (cos2(θ) - sin2(θ))) / √(l2 - r2sin2(θ))) + (r3 * sin2(θ) * cos(θ)) / (l2 - r2sin2(θ))))^(3/2))
Kommentare:
* Komplexität der Gleichung: Wie Sie sehen können, ist die Beschleunigungsgleichung ziemlich komplex und enthält trigonometrische Begriffe.
* Beschleunigungsvariation: Die Beschleunigung des Kolbens variiert während der Drehung der Kurbel kontinuierlich, erreicht maximale und minimale Werte an bestimmten Positionen.
* Grafiken: Um die Beschleunigungsvariation über die Zeit besser anzuzeigen, ist es sinnvoll, die Beschleunigung nach dem Drehwinkel des Handgriffs grafisch darzustellen.
numerische Berechnungen:
um bestimmte Zahlenwerte für Ihren Fall zu erhalten, können Sie:
* Ersetzen Sie Zahlenwerte: setzen Sie r, l, ω und θ Werte in Gleichungen ein.
* Verwenden Sie ein Tabellenblatt: Verwenden Sie ein Programm wie Excel oder ein Online-Tabellenblatt, um Beschleunigung für verschiedene Werte von θ zu berechnen.
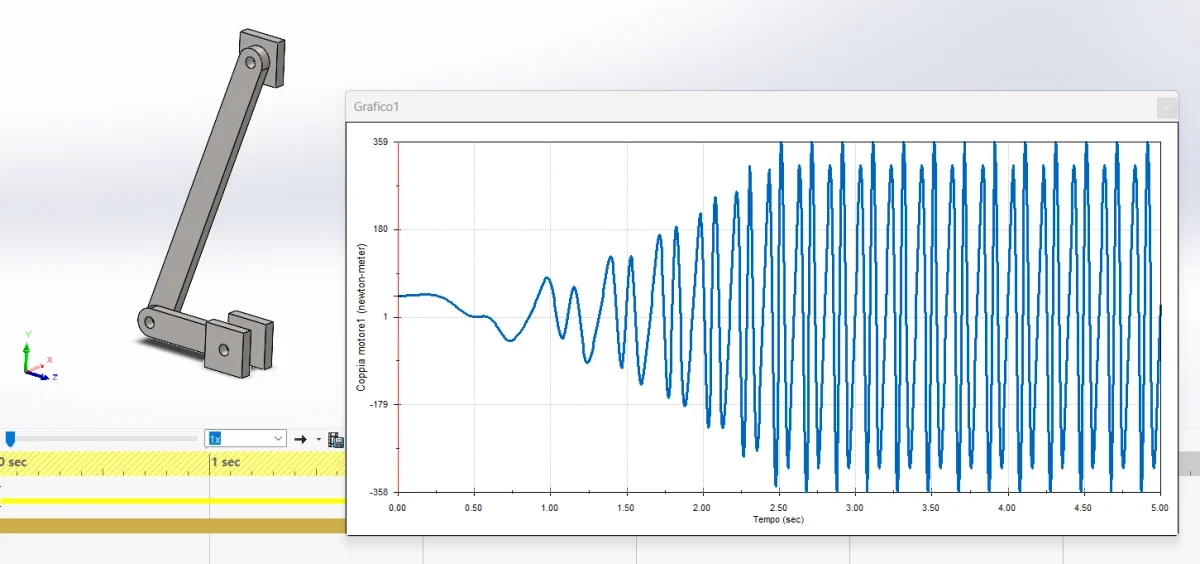
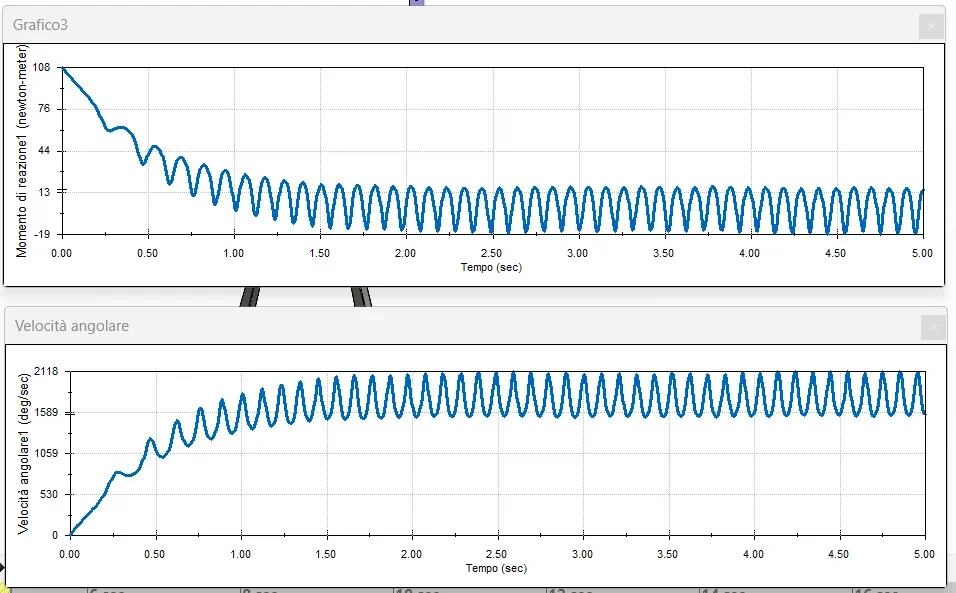
* Verwenden Sie eine Simulationssoftware: Software wie Matlab oder Cad-Programme können verwendet werden, um dynamische Simulationen des Mechanismus durchzuführen und detaillierte Grafiken der Beschleunigung zu erhalten.
Weitere Überlegungen:
* Drehwinkel: θ Winkel kann von 0 bis 2 Strahlung für eine vollständige Drehung der Kurbel variieren.
* Messeinheit: Achten Sie darauf, konsequente Messeinheiten (z.B. Meter für Längen, Strahlmittel für Winkel und Sekunden für Zeit) zu verwenden.
* Näherung: In einigen Fällen können Approximationen verwendet werden, um Berechnungen zu vereinfachen, aber es ist wichtig, die Genauigkeit der Approximationen entsprechend der spezifischen Anwendung zu bewerten.
tun alles mit Excel und Sie werden sehen, dass Sie in der Lage sein, die Diagramme, die Sie benötigen, zu verfolgen und dann von hier überschneiden die Motorkurve Leistung / Drehungen und Drehmoment / Drehungen und Sie werden beurteilen, ob es okay ist oder nicht.
Denken Sie daran, dass Sie je nach Startwinkel immer noch verschiedene Diagramme und Drehmomente erhalten, um unterschiedlich zu starten.
in all dies in der ersten unbeeinflussten Näherung betrachtet wurde: Reibung und Trägheit.
baute das Grundrechnungsblatt, das Sie mit neuen Überlegungen bereichern können.
1. Berechnung der Winkelbeschleunigung:* Umwandlung von Windungen pro Minute zu Strahlung pro Sekunde: 1 min/60 s ≈ 31,42 rad/s
* Berechnung der Winkelbeschleunigung: α = ω / t = 31.42 rad/s / 2.5 s ≈ 12.57 rad/s2
2. Kraftberechnung auf den Kolben:* Bestimmung der zur Beschleunigung der Masse erforderlichen Kraft: f = m
* Berechnung der Linearbeschleunigung des Kolbens: Dies ist ein komplexerer Teil, da die Beschleunigung des Kolbens während der Drehung der Kurbel variiert. für eine ungefähre Schätzung können Sie die maximale Beschleunigung des Kolbens betrachten, die auftritt, wenn die Kurbel senkrecht zur Biella ist. Sie können eine detailliertere Filmanalyse für eine genauere Berechnung verwenden.
3. Berechnung der Tangentialkraft am Handgriff:* Verwendung des Übersetzungsverhältnisses: Die Kraft auf den Kolben wird durch die Biella auf die Kurbel übertragen. das Übersetzungsverhältnis zwischen der Kraft auf den Kolben und der Tangentialkraft auf den Handgriff hängt von der Geometrie des Mechanismus (Länge der Biella und des Griffbalkens) ab.
* Tangentiale Kraftberechnung: f_tangenziale = f_pistone * (r_manovella / l_biella)
4. Berechnung des Drehmoments zum Handgriff:* Drehmomentdefinition: Das Paar ist das Produkt der Tangentialkraft für den Kurbelradius.
* Drehmomentberechnung: τ =
zusammenfassende Formeln:
* ω = 2πn / 60
*
* f = m * a
* f_tangenziale = f_pistone * (r_manovella / l_biella)
* τ = f_tangen * r_manovella
Kommentare:
* Näherung: Diese Berechnung liefert eine ungefähre Schätzung des Paares. für ein genaueres Ergebnis ist es erforderlich, die vollständige kinematische Analyse des Biella-Manovella-Mechanismus unter Berücksichtigung der Veränderung der Beschleunigung des Kolbens bei der Drehung der Kurbel zu berücksichtigen.
* Andere Faktoren: Andere Faktoren wie Reibung, Biellamasse und Verluste im Mechanismus können das tatsächliche Drehmoment beeinflussen.
Eine genaue Berechnung der Beschleunigung des Kolbens in einem Biella-Manovella-Mechanismus erfordert eine eingehendere Analyse der Kinematik.
Formeln und Erwägungen:zur Ermittlung der Beschleunigung des Kolbens zu jedem Zeitpunkt ist es erforderlich, die Geometrie des Mechanismus und die Winkelgeschwindigkeit des Handgriffs zu berücksichtigen.* Kolbenstellung:
die Lage des Kolbens (s) gegenüber dem oberen Totpunkt kann nach dem Drehwinkel der Kurbel (θ) und den Längen der Biella (l) und der Kurbel (r) ausgedrückt werden:
(cos(θ) + √(l2 - r2sin2(θ)))
* Kolbengeschwindigkeit:
die Position im Vergleich zur Zeit ermittelt, erhalten Sie die Kolbengeschwindigkeit:
v = ds/dt = ω * r * (sin(θ) + (r * sin(θ) * cos(θ) / √(l2 - r2sin2(θ)))
wobei ω die Winkelgeschwindigkeit der Kurbel ist.
* Kolbenbeschleunigung:
weiter die Geschwindigkeit im Vergleich zur Zeit, erhalten Sie die Beschleunigung des Kolbens:
a = dv/dt = ω2 * r * (cos(θ) + (r * (cos2(θ) - sin2(θ))) / √(l2 - r2sin2(θ))) + (r3 * sin2(θ) * cos(θ)) / (l2 - r2sin2(θ))))^(3/2))
Kommentare:
* Komplexität der Gleichung: Wie Sie sehen können, ist die Beschleunigungsgleichung ziemlich komplex und enthält trigonometrische Begriffe.
* Beschleunigungsvariation: Die Beschleunigung des Kolbens variiert während der Drehung der Kurbel kontinuierlich, erreicht maximale und minimale Werte an bestimmten Positionen.
* Grafiken: Um die Beschleunigungsvariation über die Zeit besser anzuzeigen, ist es sinnvoll, die Beschleunigung nach dem Drehwinkel des Handgriffs grafisch darzustellen.
numerische Berechnungen:
um bestimmte Zahlenwerte für Ihren Fall zu erhalten, können Sie:
* Ersetzen Sie Zahlenwerte: setzen Sie r, l, ω und θ Werte in Gleichungen ein.
* Verwenden Sie ein Tabellenblatt: Verwenden Sie ein Programm wie Excel oder ein Online-Tabellenblatt, um Beschleunigung für verschiedene Werte von θ zu berechnen.
* Verwenden Sie eine Simulationssoftware: Software wie Matlab oder Cad-Programme können verwendet werden, um dynamische Simulationen des Mechanismus durchzuführen und detaillierte Grafiken der Beschleunigung zu erhalten.
Weitere Überlegungen:
* Drehwinkel: θ Winkel kann von 0 bis 2 Strahlung für eine vollständige Drehung der Kurbel variieren.
* Messeinheit: Achten Sie darauf, konsequente Messeinheiten (z.B. Meter für Längen, Strahlmittel für Winkel und Sekunden für Zeit) zu verwenden.
* Näherung: In einigen Fällen können Approximationen verwendet werden, um Berechnungen zu vereinfachen, aber es ist wichtig, die Genauigkeit der Approximationen entsprechend der spezifischen Anwendung zu bewerten.
tun alles mit Excel und Sie werden sehen, dass Sie in der Lage sein, die Diagramme, die Sie benötigen, zu verfolgen und dann von hier überschneiden die Motorkurve Leistung / Drehungen und Drehmoment / Drehungen und Sie werden beurteilen, ob es okay ist oder nicht.
Denken Sie daran, dass Sie je nach Startwinkel immer noch verschiedene Diagramme und Drehmomente erhalten, um unterschiedlich zu starten.
in all dies in der ersten unbeeinflussten Näherung betrachtet wurde: Reibung und Trägheit.
baute das Grundrechnungsblatt, das Sie mit neuen Überlegungen bereichern können.
Zuletzt bearbeitet: