38luglio
Guest
Hallo alle,
für meine Dissertationsarbeit bin ich in der Realisierung einer Verbindungsschnittstelle zwischen einem generischen Kollaborationsroboter mit einem maximalen Gewicht von 40 kg mit einem gattungsgemäßen Agv beschäftigt. Diese Schnittstelle muss die Drehung des gesamten Cobots um eine vertikale Achse für die Positionierung dieses in den Operationen von Pick und Place ermöglichen (diese Notwendigkeit könnte z.B. auf den Wunsch zurückzuführen sein, die Zugänglichkeit des Arms oben zu verlängern, ihn in einer "ekzentrischen" Befestigung.
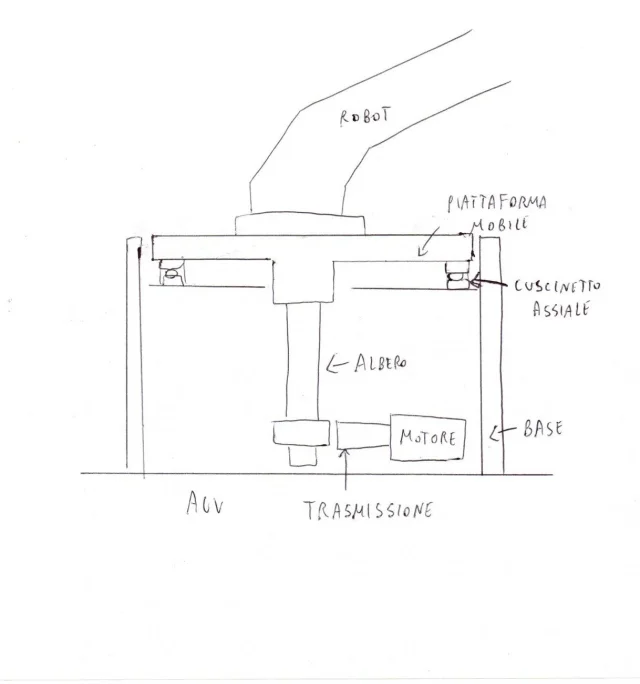
die Schnittstelle muss einen festen Teil an der Agg und ein rotierendes Teil haben, an dem der Roboter montiert ist. Um es zu entwickeln, hatte ich an das beigefügte Schema gedacht, aber ich bitte Sie einige Ratschläge zur tatsächlichen Realisierung, in Bezug auf Komponenten.
Ich hatte an einen Gleichstrommotor gedacht, der durch eine Spieß- oder Unfallübertragung mit einem Baum verbunden ist, auf dem die rotierende Plattform, die den Roboter hält (kann durch ein Rillenprofil oder einfach durch eine Lasche sein). Unter Berücksichtigung der Tatsache, dass die Systemparameter wie Motorplattendaten und Übersetzungsverhältnis durch nachfolgende Simulationen am Simulink gewählt werden, wollte ich mehr im Detail auf dem mechanischen "Layout" des Systems, insbesondere auf der vertikalen Wellenkonfiguration (Feder, Lager, Steinbrüche, Gewindekodons, etc.) als, nur um Ideen zu fixieren, ich perfekt zylinderförmig gestaltet. Betrachten Sie, dass die Basis der Schnittstelle einen Durchmesser von 500 mm und die Gesamthöhe, ausgenommen der Roboter, so wenig wie möglich sein muss. Ich warte auf Ihren Rat, danke Ihnen im Voraus.
für meine Dissertationsarbeit bin ich in der Realisierung einer Verbindungsschnittstelle zwischen einem generischen Kollaborationsroboter mit einem maximalen Gewicht von 40 kg mit einem gattungsgemäßen Agv beschäftigt. Diese Schnittstelle muss die Drehung des gesamten Cobots um eine vertikale Achse für die Positionierung dieses in den Operationen von Pick und Place ermöglichen (diese Notwendigkeit könnte z.B. auf den Wunsch zurückzuführen sein, die Zugänglichkeit des Arms oben zu verlängern, ihn in einer "ekzentrischen" Befestigung.
die Schnittstelle muss einen festen Teil an der Agg und ein rotierendes Teil haben, an dem der Roboter montiert ist. Um es zu entwickeln, hatte ich an das beigefügte Schema gedacht, aber ich bitte Sie einige Ratschläge zur tatsächlichen Realisierung, in Bezug auf Komponenten.
Ich hatte an einen Gleichstrommotor gedacht, der durch eine Spieß- oder Unfallübertragung mit einem Baum verbunden ist, auf dem die rotierende Plattform, die den Roboter hält (kann durch ein Rillenprofil oder einfach durch eine Lasche sein). Unter Berücksichtigung der Tatsache, dass die Systemparameter wie Motorplattendaten und Übersetzungsverhältnis durch nachfolgende Simulationen am Simulink gewählt werden, wollte ich mehr im Detail auf dem mechanischen "Layout" des Systems, insbesondere auf der vertikalen Wellenkonfiguration (Feder, Lager, Steinbrüche, Gewindekodons, etc.) als, nur um Ideen zu fixieren, ich perfekt zylinderförmig gestaltet. Betrachten Sie, dass die Basis der Schnittstelle einen Durchmesser von 500 mm und die Gesamthöhe, ausgenommen der Roboter, so wenig wie möglich sein muss. Ich warte auf Ihren Rat, danke Ihnen im Voraus.