

Únase al foro de diseñadores!
Su experiencia es vital para la comunidad. Únase a nosotros y aporte sus conocimientos.
Únase ahora al ForoComparta, aprenda y crezca con los mejores profesionales del sector.

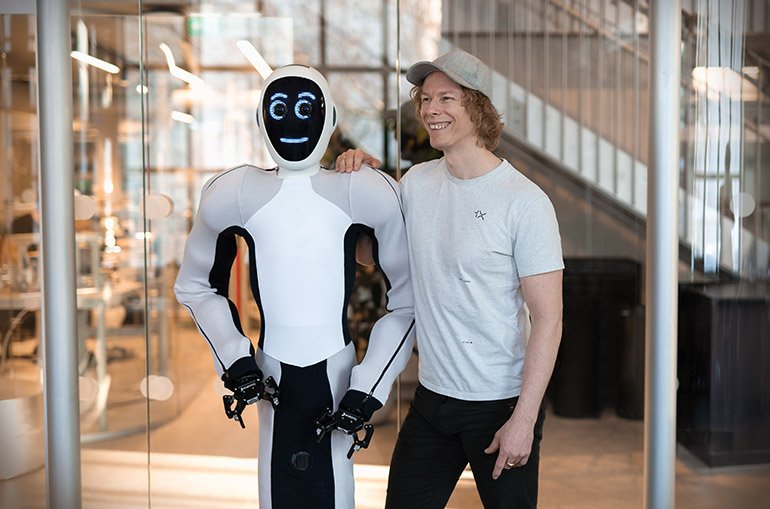
NEO está diseñado para usos domésticos y otros servicios. Fuente: 1X Technologies
Los humanoides y la inteligencia artificial fueron los protagonistas de la robótica el año pasado, y esa tendencia continúa. 1X Technologies AS, antes conocida como Halodi Robotics, ha anunciado hoy que ha conseguido 100 millones de dólares en financiación de serie B para desarrollar robots humanoides de uso general. La empresa, con sede en Moss (Noruega), dijo que planea utilizar el nuevo capital para sacar al mercado su androide NEO de segunda generación.
«Estamos encantados de que estos inversores líderes apoyen la misión de 1X de desplegar de forma segura androides con un comportamiento inteligente en nuevos mercados», declaró Bernt Øivind Børnich, consejero delegado de 1X, en un comunicado. «Nuestro próximo hito será escalar nuestra estrategia de recopilación de datos para la IA incorporada y ofrecer NEO a los consumidores».
Fundada en 2014, 1X afirmó que su objetivo es producir sistemas seguros que beneficien a la sociedad y satisfagan la demanda laboral mundial a escala comercial. La empresa ha desarrollado el servomotor Revo1, del que afirmó que tenía «la mayor relación par-peso» del mundo.
En 2020, 1X se asoció con Everon by ADT International para desplegar entre 150 y 250 androides para la vigilancia nocturna de edificios comerciales estadounidenses. En 2022, la empresa se asoció con OpenAI, creador de ChatGPT, para desarrollar el aprendizaje corporal. El año pasado, 1X siguió construyendo y entrenando a sus robots EVE y NEO.
1X está enseñando a NEO a caminar y a realizar tareas domésticas
1X ha diseñado el NEO bípedo para que le ayude con una amplia gama de tareas domésticas. Øivind Børnich respondió a las siguientes preguntas de El Informe Robot:
¿Cuáles son algunos de los retos técnicos que 1X abordará con esta financiación: locomoción bípeda, manipulación y/o colaboración segura con humanos?
Børnich: Nos centraremos en la formación de modelos básicos que encapsulen todos estos comportamientos. Dicho esto, la manipulación y la colaboración segura son nuestras principales áreas de interés. Mientras que la locomoción bípeda se considera a menudo una cuestión resuelta desde el punto de vista de la IA y el software, y más bien un reto de hardware, nuestro enfoque la integra con los objetivos de manipulación.
La transición de la locomoción basada en ruedas a la locomoción bípeda en nuestros robots humanoides es estratégica. Su objetivo es facilitar una manipulación más eficaz, especialmente en espacios reducidos como los hogares. En estos entornos, las tareas a menudo implican ejercer una fuerza significativa en zonas limitadas, como mover muebles, limpiar o abrir una nevera.
El diseño bípedo permite a nuestros robots maniobrar con eficacia en tales espacios, utilizando todo su cuerpo. Esto incluye habilidades como arrastrarse lateralmente, apoyarse en superficies o inclinarse para mantener el equilibrio y aplicar fuerza, todo ello dentro de un espacio compacto.
Nuestro objetivo no es sólo caminar; se trata de aprovechar todo el potencial del cuerpo del humanoide para tareas de manipulación prácticas y eficientes. Además, garantizar la seguridad en las interacciones humano-robot es primordial.
A medida que avanzamos, nuestro objetivo es capacitar a nuestros robots para ejercer fuerzas considerables y realizar tareas complejas en espacios muy reducidos, manteniendo al mismo tiempo una coexistencia segura con los humanos.
El consejero delegado de 1X, Bernt Øivind Bornich, y el EVE. Fuente: 1X Technologies
¿Qué tipo de conectividad con la nube requerirá el NEO para hacer realidad la IA incorporada?
Børnich: NEO operará de forma independiente con IA incorporada, funcionando de forma autónoma para la mayoría de las tareas. Sin embargo, para el razonamiento y la planificación avanzados a largo plazo, depende inicialmente de modelos externos basados en la nube, como los de OpenAI. Esto supone una funcionalidad reducida sin conectividad con la nube.
Una conexión estándar a Internet de banda ancha basta para esta interacción con la nube, lo que garantiza que NEO acceda a todas sus capacidades cuando esté conectado.
¿Se centra 1X primero en oficinas, almacenes u hogares?
Børnich: Nuestro androide EVE trabaja actualmente en logística y vigilancia. El objetivo inicial con NEO será la integración en entornos domésticos, entrando primero en el mercado de los hogares de consumo.
¿Qué tipo de datos tiene previsto recopilar?
Børnich: Queremos recopilar datos egocéntricos de locomoción y manipulación, además del diálogo general y las interacciones sociales de una forma que tenga en cuenta la privacidad.
Nuestro principal interés radica en los datos relacionados con lo que denominamos manipulación: comprender cómo se realizan las tareas en un entorno como el hogar para que nuestros androides puedan aprender a utilizar su cuerpo de forma eficaz para las tareas del sector en el que trabajan.
¿Tienen socios para entrenar al robot a realizar diferentes tareas?
Børnich: El comportamiento más inteligente de nuestros androides está entrenado principalmente por operadores 1X que utilizan EVE en nuestro estudio para la recopilación de datos. Seguiremos escalando para tareas entrenadas y nuevas habilidades a medida que aumentemos nuestros despliegues en mercados de consumo y otros nuevos.
Actualmente, tenemos 20 androides en nuestro estudio recopilando datos de forma activa, además de los EVE desplegados en el emplazamiento del cliente. Nuestro equipo de 12 operadores a tiempo completo ayuda a los androides a aprender y perfeccionar diversas tareas. Inspirándose en la comunidad de IA de código abierto, nuestros operadores se centran en entrenar sus propios modelos y se convierten en expertos en cómo sacarles el máximo partido.
Este enfoque permite una iteración rápida, superando el modelo tradicional en el que sólo los ingenieros de IA se encargan del entrenamiento. En consecuencia, nuestros ingenieros de IA pueden concentrarse en mejorar la calidad y la arquitectura de los datos, mientras que los operadores se especializan en la eficiencia y la calidad de los datos. Este sistema de colaboración nos permite optimizar nuestros procesos de formación y mejorar las capacidades de nuestros androides de forma más eficaz.
El androide EVE se entrena para realizar diferentes tareas en el laboratorio de 1X. Fuente: 1X Technologies
¿En qué se diferencia NEO de otros androides o robots humanoides en desarrollo?
Børnich: NEO pesa 30 kg [66.1 lb.] y mide 167 cm [65 in.] de altura, aproximadamente la estatura media de un humano. Tiene la misma amplitud de movimientos que nosotros, manos completamente diestras y puede levantar 75 kg. [165.3 lb.] en un levantamiento de peso muerto o en cuclillas.
Pero lo que realmente hace único a NEO entre los robots humanoides es que no es una máquina industrial. Es blando como nosotros, ligero e inherentemente seguro, sin puntos de pellizco ni otros peligros, lo que es crucial para que podamos perseguir nuestra visión de desplegar androides seguros y útiles para los consumidores.
La inversión fluye rápidamente hacia los androides
EQT Ventures y otros inversores globales participaron en la ronda de la serie B de 1X Technologies. La empresa completó su ronda de financiación de serie A, liderada por OpenAI y Tiger Global, en marzo de 2023. 1X señaló que ya ha recaudado más de 125 millones de dólares en menos de 12 meses.
Como parte de la última ronda, 1X también facilitó una transacción secundaria en la que el inversor existente Sandwater aumentó su participación con la tercera mayor aportación a la ronda. Otros participantes secundarios fueron el nuevo inversor Samsung NEXT, así como los inversores existentes Skagerak Capital y el grupo Nistad.
«Desde Leonardo da Vinci hasta la ciencia ficción actual, los humanos han soñado con robots humanoides durante más de 500 años», afirmó Ted Persson, socio de EQT Ventures. «Es un privilegio ser testigos de cómo las tecnologías facilitadoras se forman ante nuestros ojos, en tiempo real».
«El impacto de que los androides se unan a nuestra mano de obra humana, en nuestros términos, será transformador, como mínimo», añadió. «Estamos convencidos de que 1X, con sus androides NEO, desempeñará un papel crucial en los pasos pioneros hacia las primeras incursiones de nuestro futuro tecnológico y humano».
Únase al foro de diseñadores!
Su experiencia es vital para la comunidad. Únase a nosotros y aporte sus conocimientos.
Únase ahora al ForoComparta, aprenda y crezca con los mejores profesionales del sector.