

Únase al foro de diseñadores!
Su experiencia es vital para la comunidad. Únase a nosotros y aporte sus conocimientos.
Únase ahora al ForoComparta, aprenda y crezca con los mejores profesionales del sector.
RESUMEN
Para los usuarios de Ansys Mechanical, la ampliación a Ansys Motion puede desbloquear nuevas y potentes capacidades, pero hacer esa transición requiere algo más que navegar por una interfaz familiar. Aunque ambas herramientas comparten el mismo entorno gráfico, se basan en solvers y enfoques de modelado fundamentalmente diferentes. Comprender estas diferencias conceptuales es esencial para aprovechar Ansys Motion de forma eficaz y evitar errores comunes. Tanto si desea ampliar su ámbito de simulación como mejorar sus flujos de trabajo actuales, reconocer dónde termina Mechanical y dónde empieza Motion es clave para una integración eficaz y satisfactoria. En este blog, exploraremos estas distinciones críticas para ayudar a los usuarios de Mechanical a adentrarse con confianza en el mundo de la dinámica multicuerpo.
En este blog no nos centraremos en detalles específicos de configuración. En su lugar, el objetivo es resaltar las diferencias más amplias del flujo de trabajo entre Ansys Mechanical y Ansys Motion. Aunque ambas herramientas forman parte del mismo ecosistema de simulación, se basan en filosofías de modelado diferentes. Esto significa que para utilizar Ansys Motion con eficacia, los usuarios de Mechanical deben adaptar su enfoque habitual. Exploraremos conceptos y ajustes clave que son esenciales para realizar con éxito la transición de flujos de trabajo y aprovechar al máximo las capacidades de Ansys Motion.
Características únicas de la configuración de Motion
Pensando en la forma en que se definen las cosas en Motion, es posible identificar dos diferencias principales respecto a Mechanical:
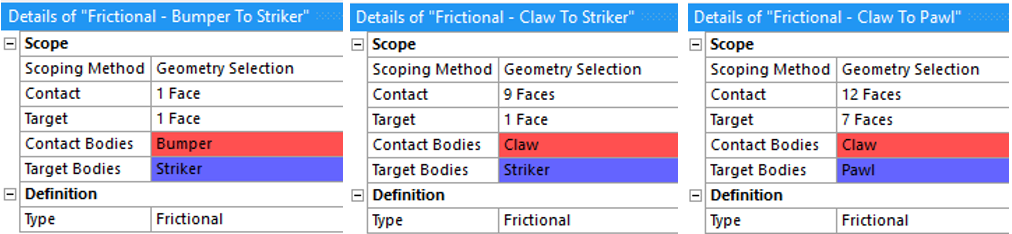
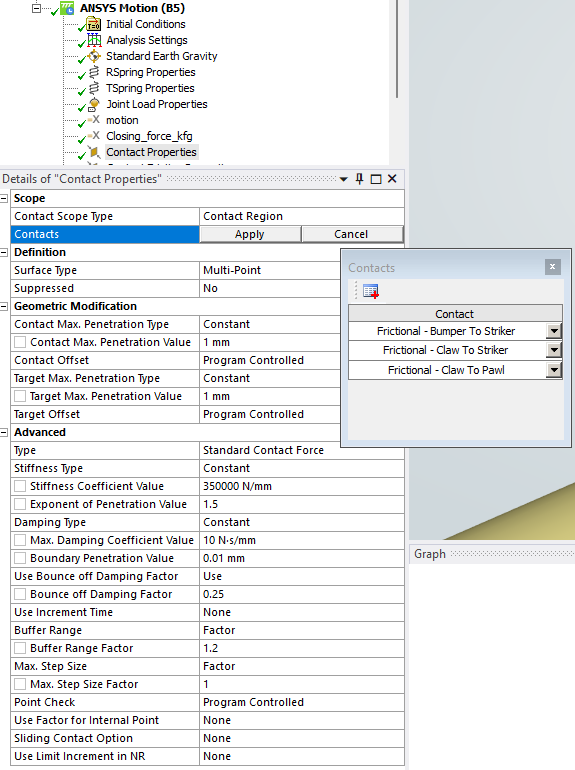
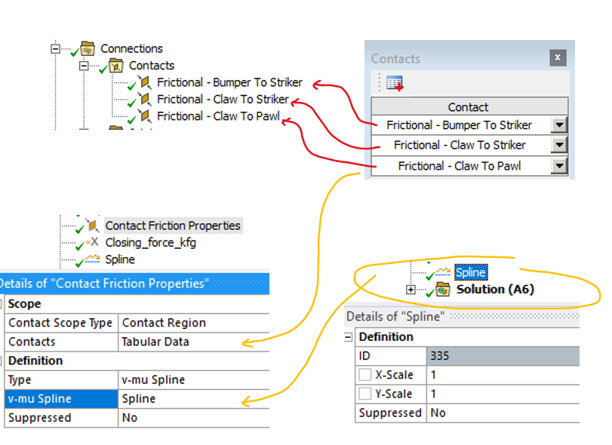
- Definiciones de propiedades agrupadas: En Motion, es posible definir propiedades para varios objetos similares utilizando un objeto Propiedades independiente que se aplica a todo el grupo. El objetivo aquí es evitar definir valores iguales para cada objeto individual. Imagina un modelo con docenas de contactos y necesitas definir propiedades de fricción similares para cada uno de ellos. Si estuviera trabajando en Mechanical, necesitaría definir el coeficiente de fricción en cada sección de propiedades de contacto. En Motion, creando un objeto de propiedades de contacto puedes apuntar todos los pares de contactos deseados definiendo los valores una sola vez.En este ejemplo, podemos ver un modelo con tres contactos definidos para considerar la interacción entre varias partes. En esta configuración hay dos objetos Motion destinados a definir las propiedades numéricas y de fricción. En comparación con Mechanical, sería necesaria una definición completa en cada objeto de contacto.

Definición de contacto:
Objeto de propiedades de contacto: Observe que el ámbito es una lista que incluye los tres objetos de contacto definidos.
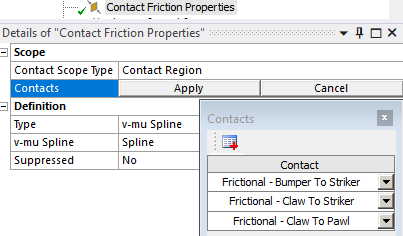
Propiedades de fricción de los contactos:
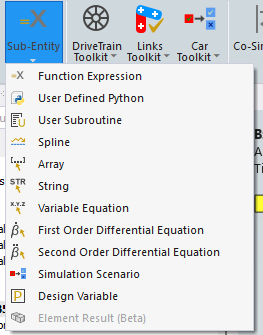
- Uso de funciones: La segunda gran diferencia es la forma de crear funciones. En Mecánica se pueden definir algunas funciones básicas directamente sobre el objeto (por ejemplo para definir una fuerza variable en el tiempo). En Movimiento, el menú Sub-Entidad permite crear funciones más avanzadas. Una explicación más detallada de las funciones disponibles se puede encontrar en la ayuda de Ansys: https://ansyshelp.ansys.com/account/secured?returnurl=/Views/Secured/corp/v251/en/motion_ug/motion_ug_using_motionfeat.html
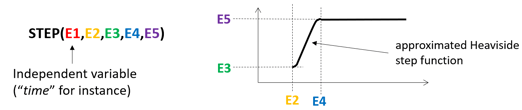
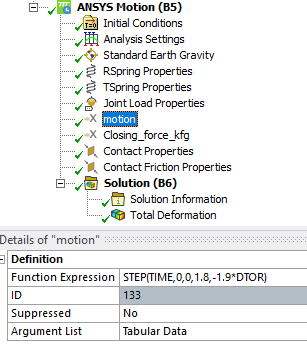
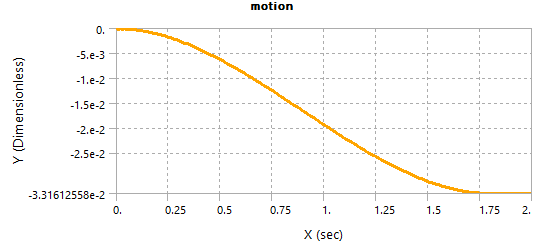
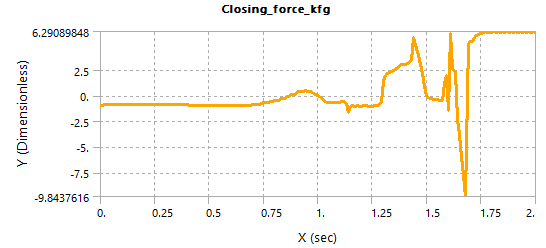
Continuando con el ejemplo, utilizando el objeto ‘Function Expression’ se crearon dos funciones. La primera para definir un desplazamiento rotacional para una articulación. La segunda función calcula el par de reacción en una articulación de revolución.Expresión de la función: STEP. Esta función crea una transición suave entre un valor mínimo y un valor máximo durante dos puntos «temporales». Nuestra función está pensada para definir la rotación, por eso convertimos el argumento final a radianes utilizando la constante DTOR.
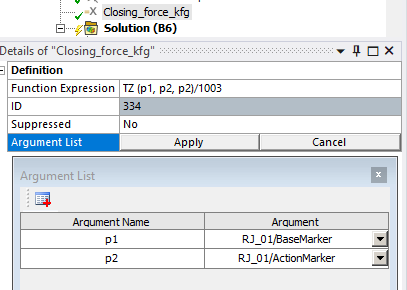
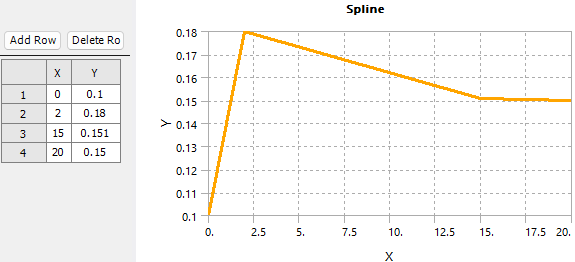
Expresión de la función: TZ. Esta función calcula el par en una junta rotacional llamada RJ_01. Utiliza dos argumentos llamados p1 y p2. Son marcadores creados automáticamente en la articulación. - Definiciones anidadas: Como puedes imaginar, los objetos independientes definidos anteriormente necesitan ser ensamblados de alguna manera para completar la configuración. En el modelo de ejemplo, el coeficiente de fricción no es constante. Se crea una spline para definir la variación de este coeficiente con la velocidad relativa. Entonces, necesitamos un objeto Spline para ser usado en el objeto Propiedades de fricción de los contactos y este objeto es usado para definir el comportamiento de los contactos. La lógica es la misma aunque no necesitemos una conexión específica entre objetos.

CONCLUSIÓN
- Ansys Motion utiliza las mismas funciones de preprocesamiento que una simulación mecánica estándar: geometría, conexiones, contacto y mallado.
- Hay algunas características específicas para Ansys Motion para: propiedades y marcadores de cuerpo, propiedades de contacto, condiciones de contorno y fuerzas de unión especiales, expresiones variables, botones de co-simulación, exportación de archivos y ejecución del post-procesador de Ansys Motion.
Únase al foro de diseñadores!
Su experiencia es vital para la comunidad. Únase a nosotros y aporte sus conocimientos.
Únase ahora al ForoComparta, aprenda y crezca con los mejores profesionales del sector.