

Únase al foro de diseñadores!
Su experiencia es vital para la comunidad. Únase a nosotros y aporte sus conocimientos.
Únase ahora al ForoComparta, aprenda y crezca con los mejores profesionales del sector.
El futuro del transporte promete hacer la vida más segura y móvil para todos, con resultados económicos positivos. Sin embargo, para hacer realidad esa promesa, es necesario probar los nuevos vehículos y cada subsistema de su arquitectura, especialmente a medida que los subsistemas se vuelven más inteligentes y altamente complejos.
El aumento de la complejidad requiere un cambio radical de los métodos de ensayo y nuevos conceptos para la verificación y validación exhaustivas de los vehículos, tanto en el mundo físico como en el virtual, lo que se plasma en la nueva normativa.
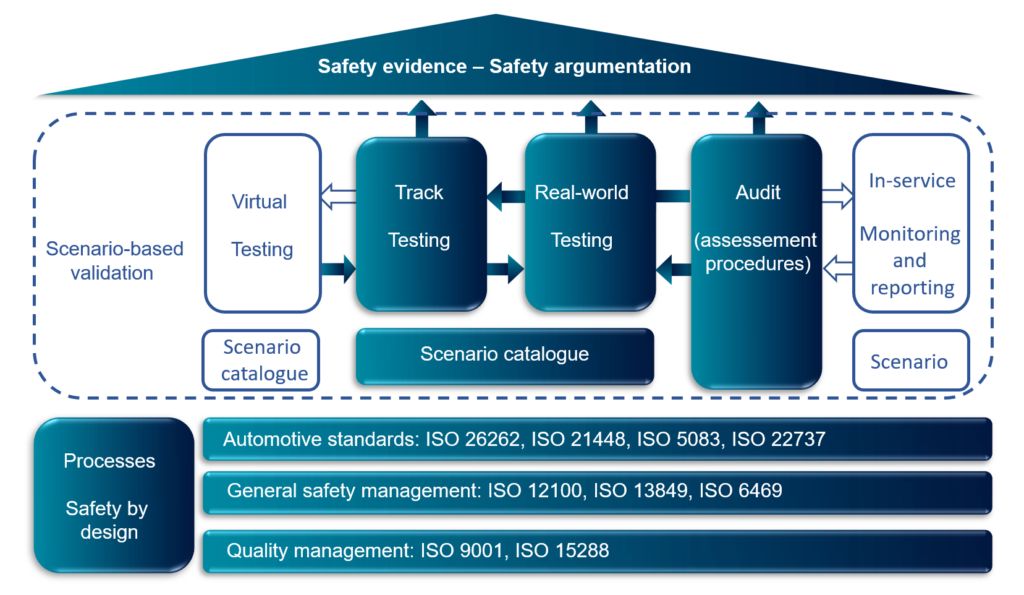
En este sentido, en febrero de 2021, la UNECE (Comisión Económica de las Naciones Unidas para Europa) presentó el Nuevo Método de Evaluación/Prueba para la Conducción Automatizada (NATM) – un marco, que introduce un enfoque multipilar para la validación de la seguridad de la conducción automatizada (ver Fig. 1) NATM, Directrices.
Además, en agosto de 2022, la Comisión de la UE adoptó el Reglamento 2022/1426 por el que se establecen las disposiciones de aplicación del Reglamento (UE) 2019/2144 del Parlamento Europeo y del Consejo en lo relativo a los procedimientos uniformes y las especificaciones técnicas para la homologación del sistema de conducción automatizada (ADS) de los vehículos totalmente automatizados 2144, 1426.
¿Qué es la validación de seguridad multipilar de AV?
La validación de seguridad multipilar de los vehÃculos automatizados especifica 5 pilares de certificación, que sustentan la argumentación de seguridad. Además de los tres pilares conocidos (ensayos en pista, pruebas en el mundo real y auditoría), el reglamento menciona pruebas virtuales y supervisión en servicio.
En este blog, la verificación, la validación, la certificación y la garantía se definen/describen como sigue:
- Verificación: es una actividad que determina si un sistema cumple los requisitos, respondiendo a la pregunta: «¿Hemos construido bien el sistema?»
- Validación: consiste en evaluar si el sistema satisface las necesidades del usuario final, respondiendo a la pregunta: «¿Hemos construido el sistema adecuado? Por otro lado, validación del modelo consiste en evaluar lo bien que el modelo representa la realidad.
- Garantía: es la confianza justificada en que el sistema funciona según lo previsto.
- Certificación: determina si un sistema se ajusta a un conjunto de criterios o normas.
En el caso de los vehículos autónomos, la comunidad científica se dio cuenta pronto de que sólo las pruebas en el mundo real -con una cobertura basada en el kilometraje- no son viables, desde un punto de vista económico y técnico.
Una de las razones principales es que durante las pruebas en el mundo real, los sucesos relevantes para la seguridad, ocurren muy raramente. Por lo tanto, resulta obvio que las pruebas virtuales desempeñarán un papel clave en la certificación de los sistemas de conducción automatizada. El resultado de las pruebas virtuales puede contribuir a la argumentación de seguridad si y sólo si las simulaciones son creíbles, esto se discute brevemente en la siguiente sección y se detallan en NATM, Directrices.
Pruebas virtuales y evaluación de la credibilidad de la simulación
En el caso de las pruebas virtuales, sustituimos uno o varios elementos físicos por un modelo de simulación.
Las pruebas virtuales utilizadas para la validación de sistemas de conducción automatizada (ADS) pueden alcanzar diferentes objetivos, en función de la estrategia de validación global y de la precisión de los modelos de simulación subyacentes.
Algunos de los objetivos podrían ser:
- Proporcionar confianza cualitativa o estadística en la seguridad del sistema completo.
- Proporcionar confianza cualitativa o estadística en el rendimiento de subsistemas/componentes específicos.
- Descubrir escenarios desafiantes para realizar pruebas en el mundo real (por ejemplo, pruebas en el mundo real y pruebas en pista).
En contraste con todas sus ventajas potenciales, una limitación de este enfoque reside en la fidelidad intrínsecamente limitada de los modelos. Dado que los modelos sólo pueden ofrecer una representación aproximada de la realidad, es necesario evaluar cuidadosamente la idoneidad de un modelo para sustituir satisfactoriamente al mundo real a la hora de validar la seguridad de los ADS.
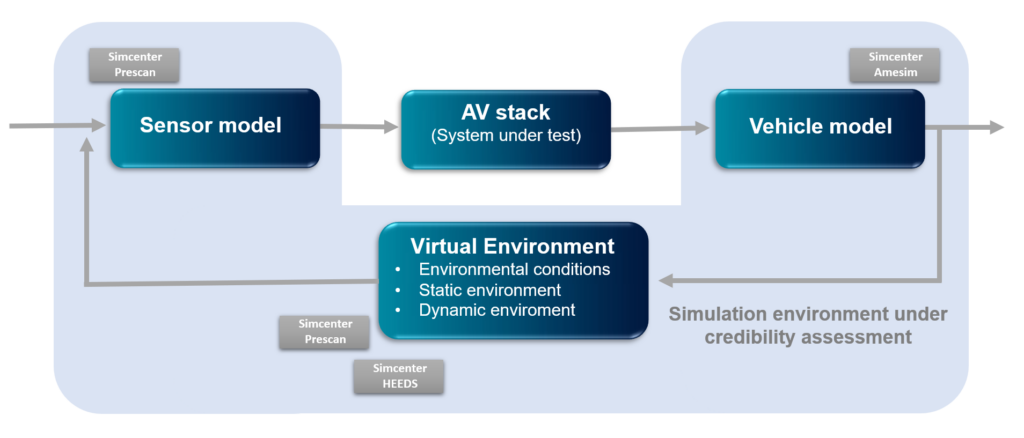
Por lo tanto, se evaluará la credibilidad de los modelos de simulación y del entorno de simulación mostrados en la Fig. 2 para determinar la transferibilidad y fiabilidad de los resultados en comparación con el rendimiento en el mundo real.
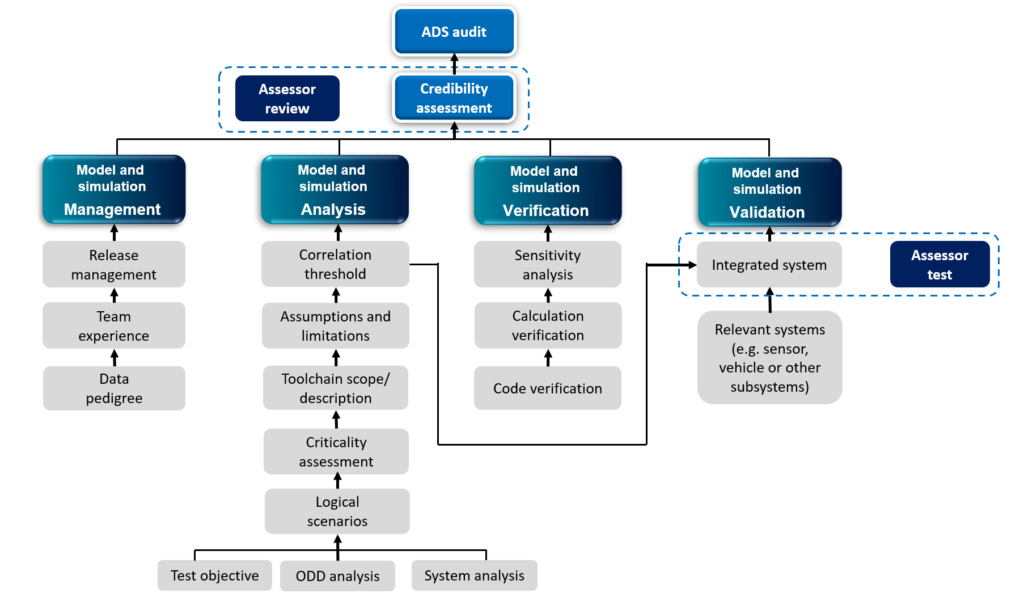
Además de los modelos de simulación y el entorno de simulación, la evaluación de la credibilidad se extiende también a la gestión del modelo y la simulación. Todos estos aspectos se recogen en la Fig. 3.
Lea el libro blanco de Siemens
Para saber más sobre los flujos de trabajo de desarrollo del vehículo autónomo, lea esto libro blancoque describe con más detalle:
- Los retos relacionados con el desarrollo AV
- el flujo de trabajo de la ingeniería de vehículos
- Las pruebas de vehículos autónomos basadas en escenarios y los flujos de trabajo de las pruebas basadas en escenarios
- El flujo de trabajo de evaluación de la credibilidad de la simulación
Actividades en curso y normativa pertinente
A partir de octubre de 2022, RDW (Autoridad Holandesa de Vehículos), CCI (Centro Común de Investigación de la Comisión Europea) y Siemens Industry Software Netherlands B.V., colaboraron estrechamente para comprender cómo interpretar y cómo aplicar el nuevo reglamento, especialmente, cómo aplicar el marco de evaluación de la credibilidad.
Para una mejor comprensión, se ha considerado un caso de uso específico (aparcacoches automatizado) y se ha aplicado cada paso del marco de evaluación de la credibilidad de la simulación a este caso de uso.
El resultado de estas investigaciones se ha resumido en un manual de evaluación de la credibilidad, que podría servir de guía a los fabricantes de equipos originales de automoción, interesados en utilizar las pruebas virtuales como pilar de certificación.
Por último, para el lector interesado, en las tablas siguientes se ofrece un resumen de las normas y enlaces pertinentes.
Normativa de la CEPE:
| Número de reglamento | Nombre del reglamento | Finalidad |
| Acuerdo de 1958 | ECE/TRANS/WP.29/2016/2 | Acuerdo sobre la adopción de reglamentos técnicos armonizados de las Naciones Unidas para los vehículos de ruedas y los equipos y piezas que puedan montarse o utilizarse en éstos, y sobre las condiciones de reconocimiento recíproco de las homologaciones concedidas conforme a dichos reglamentos de las Naciones Unidas. |
| R155 | E/ECE/TRANS/505/Rev.3/Add.154 | Disposiciones uniformes relativas a la homologación de vehículos en relación con la ciberseguridad y el sistema de gestión de la ciberseguridad |
| R156 | ECE/TRANS/WP.29/2020/80 | Disposiciones uniformes relativas a la homologación de vehículos con respecto a la actualización de software y al sistema de gestión de actualizaciones de software |
| R157 | ECE/TRANS/WP.29/2020/81 | Disposiciones uniformes relativas a la homologación de vehículos con respecto a los sistemas automatizados de mantenimiento de carril |
| NATM | ECE/TRANS/WP.29/2021/61 | Nuevo método de evaluación/prueba para la conducción automatizada (NATM) Directrices para la validación del sistema de conducción automatizada (ADS |
| Directrices | ECE/TRANS/WP.29-187-10/2022 | Directrices y recomendaciones sobre los requisitos de seguridad de los sistemas de conducción automatizada |
Reglamento de la UE:
| Número de Reglamento | Nombre del reglamento | Finalidad |
| 858 | REGLAMENTO (UE) 2018/858 DEL PARLAMENTO EUROPEO Y DEL CONSEJO | Homologación de tipo y vigilancia del mercado de los vehículos de motor y de los remolques, sistemas, componentes y unidades técnicas independientes destinados a dichos vehículos |
| 2144 | REGLAMENTO (UE) 2019/2144 DEL PARLAMENTO EUROPEO Y DEL CONSEJO | Requisitos de homologación de tipo para los vehículos de motor y sus remolques, y los sistemas, componentes y unidades técnicas independientes destinados a dichos vehículos, en lo que concierne a su seguridad general y a la protección de los ocupantes de los vehículos y los usuarios vulnerables de la vía pública |
| 168 | REGLAMENTO (UE) No 168/2013 DEL PARLAMENTO EUROPEO Y DEL CONSEJO | Homologación y vigilancia del mercado de vehículos de dos o tres ruedas y cuatriciclos |
| 1426 | REGLAMENTO DE APLICACIÓN (UE) 2022/1426 DE LA COMISIÓN | por el que se establecen las disposiciones de aplicación del Reglamento (UE) 2019/2144 del Parlamento Europeo y del Consejo en lo relativo a los procedimientos uniformes y las especificaciones técnicas para la homologación del sistema de conducción automatizada (ADS) de los vehículos totalmente automatizados |
Participación de Siemens en proyectos de la UE
Además de las actividades de investigación en curso dirigidas por Siemens, RDW y el CCI sobre el enfoque multipilar para la validación de la seguridad de los vehículos automatizados, Siemens participa en los siguientes proyectos de la UE:
- FOCETA (FOundaciones para Continuo Engeniería de Trustworthy Autonomía)
Convergencia de la ingeniería basada en datos y en modelos. El avance científico dirigido subyacente de FOCETA radica en la convergencia de los enfoques basados en modelos y en datos. Esta convergencia se complica aún más por la necesidad de aplicar la verificación y la validación de forma incremental y evitar esfuerzos completos de re-verificación y re-validación. - AIthena (proyecto financiado por la UE con el número 101076754). AIthena es un proyecto de investigación e innovación sobre Conectado y Cooperativa Automatizado Mobilidad (CCAM) que pretende construir tecnologías CCAM fiables, explicables y responsables.
- UrbanSmartPark (primer proyecto dentro de «KIC Movilidad Urbana«, una iniciativa europea apoyada por el IET, el Instituto Europeo de Innovación & Tecnología). UrbanSmartPark El proyecto se centra en el desarrollo de aparcamientos automatizados en el centro de las ciudades que ofrezcan una amplia gama de posibles servicios relacionados con el estacionamiento. Lea este blog para saber más.
- SUNRISE (Acciones Horizonte de Investigación e Innovación, Proyecto nº 101069573 Convocatoria HORIZON-CL5-2021-D6-01). El SUNRISE pretende establecer un marco común de garantía de la seguridad, interconectando silos y haciendo que colaboren de forma armonizada.
- DITM (Digital Infraestructura para el futuro Mobility, programa financiado por NextGenerationEU). Con el objetivo de apoyar los sistemas de conducción automatizada, el DITM Los socios están desarrollando una arquitectura de sistemas para la infraestructura digital, que incluye las tecnologías básicas críticas asociadas a la localización, los servicios de tráfico, los mapas digitales, la infraestructura de recarga y la validación continua de la seguridad.
Si desea más información sobre el proyecto, póngase en contacto con el doctor Alexandru Forrai ([email protected]), ingeniero y consultor de Siemens Digital Industries Software.
Únase al foro de diseñadores!
Su experiencia es vital para la comunidad. Únase a nosotros y aporte sus conocimientos.
Únase ahora al ForoComparta, aprenda y crezca con los mejores profesionales del sector.