

Únase al foro de diseñadores!
Su experiencia es vital para la comunidad. Únase a nosotros y aporte sus conocimientos.
Únase ahora al ForoComparta, aprenda y crezca con los mejores profesionales del sector.
Descubra la potencia de ANSYS Motion para simular la dinámica de ensamblaje de brazos robóticos y optimizar su rendimiento.
Comprender ANSYS Motion y sus capacidades
ANSYS Motion es un robusto software de simulación que permite a los ingenieros analizar y predecir el comportamiento de los sistemas mecánicos, incluidos los brazos robóticos. Utilizando ANSYS Motion, los ingenieros pueden simular el movimiento y la dinámica de los brazos robóticos, obteniendo una comprensión exhaustiva de cómo se mueve y responde el brazo en diferentes condiciones.
Un punto fuerte clave de ANSYS Motion reside en su modelado y simulación precisos de las intrincadas interacciones entre los diversos componentes de un brazo robótico, como articulaciones, eslabones y actuadores. Esta capacidad permite a los ingenieros evaluar el rendimiento del brazo e identificar posibles áreas de mejora o problemas.
Además, ANSYS Motion proporciona una amplia gama de herramientas y funciones de análisis que permiten a los ingenieros investigar el impacto de distintos factores en el rendimiento de un brazo robótico. Esto incluye examinar los efectos de diversas estrategias de control, optimizar la trayectoria del brazo y evaluar su estabilidad y seguridad.
Nuestros brazos robóticos están diseñados a propósito para manipular objetos sin esfuerzo utilizando actuadores lineales conectados a bloques colocados sobre raíles. Este diseño innovador permite a los brazos manipular objetos sin esfuerzo mediante una combinación de movimientos de bloques. En esta demostración, el brazo demostrará su capacidad transportando una masa de 85 kg.
Diseño y construcción de un modelo de brazo robótico en ANSYS Motion
La creación de un modelo de brazo robótico en ANSYS Motion requiere un proceso paso a paso. En primer lugar, los ingenieros deben recopilar información esencial sobre el brazo, como sus dimensiones, materiales y componentes mecánicos. Estos datos sirven de base para desarrollar un modelo 3D preciso utilizando las herramientas de diseño 3D de ANSYS.
Tras crear el modelo 3D, los ingenieros tienen la posibilidad de especificar la estructura cinemática del brazo, determinando la cantidad y el tipo de articulaciones y conexiones, así como el rango de movimiento de cada articulación. Esto permite a ANSYS Motion simular con precisión el movimiento y la dinámica del brazo.
Para simular el tripteron, utilizamos una articulación fija para sujetar con seguridad el raíl. Además, hay tres articulaciones traslacionales que permiten el movimiento del brazo robótico, así como seis articulaciones revolutas que establecen conexiones entre los brazos y todo el sistema, imitando rodamientos. Consulte la figura 1 para ver una representación visual de esta configuración.
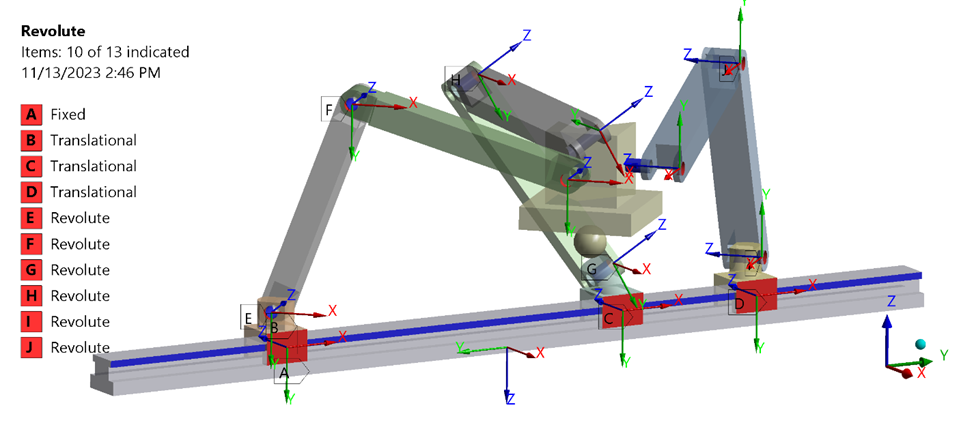
Figura 1: Definiciones de las articulaciones del sistema robótico
A continuación, los ingenieros deben definir los actuadores del brazo, como motores o sistemas hidráulicos, y sus correspondientes estrategias de control. Esto permite a ANSYS Motion simular el accionamiento del brazo y su respuesta a las entradas de control.
Como muestra la figura 2 tenemos expresiones de función que definen los movimientos de cada bloque para que podamos controlar el objeto en el espacio cartesiano.
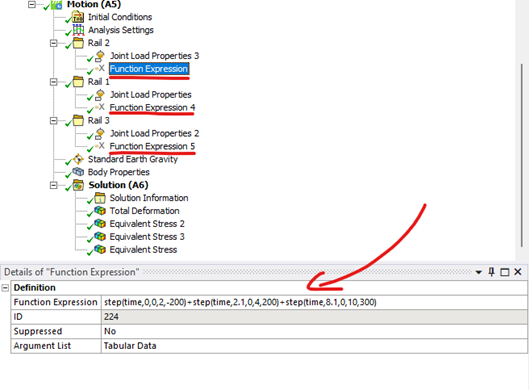
Figura 2: Definición de expresiones de función
Además, el modelo también incluye un objeto de propiedades del cuerpo, como se muestra en la figura 3. Esta característica proporcionada por ANSYS Motion permite realizar simulaciones más rápidas en comparación con los solvers habituales. Al cambiar la definición del cuerpo de cuerpo nodal a cuerpo modal, el solver puede realizar análisis modales para los cuerpos específicos a los que se aplica. Este eficaz análisis de dinámica multicuerpo utiliza la información de rigidez para calcular con precisión las tensiones y deformaciones en los cuerpos.
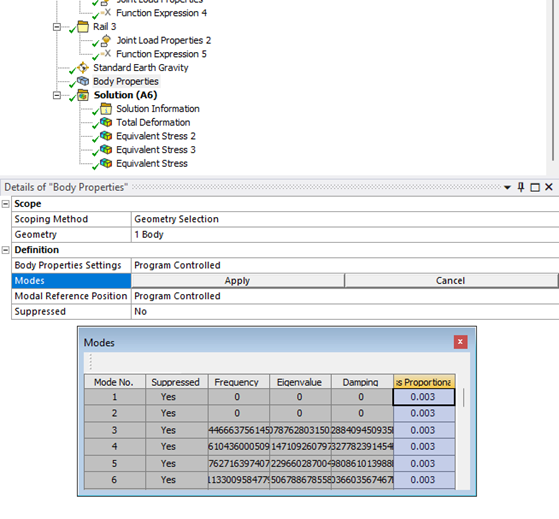
Figura 3: Definición del objeto propiedad del cuerpo
Una vez definidos la estructura cinemática y los actuadores del brazo, los ingenieros pueden realizar simulaciones en ANSYS Motion para analizar a fondo el rendimiento del brazo. Este análisis abarca la evaluación de su movimiento, fuerzas, pares y otros parámetros dinámicos en diversos escenarios operativos.
Los resultados de tensión, deformación y deformación pueden trazarse en el dominio temporal, como se demuestra en la Animación 1 a continuación, para optimizar el rendimiento de los brazos robóticos.
Animación 1: Resultado de la tensión en el dominio del tiempo
Las fuerzas que los tres actuadores deben aplicar para manipular el objeto pueden analizarse y trazarse para elegir los actuadores, como se muestra en la figura 4. Además, se pueden crear y trazar varios movimientos, fuerzas, pares y otros parámetros dinámicos en diferentes condiciones de funcionamiento para mejorar la eficacia del sistema.
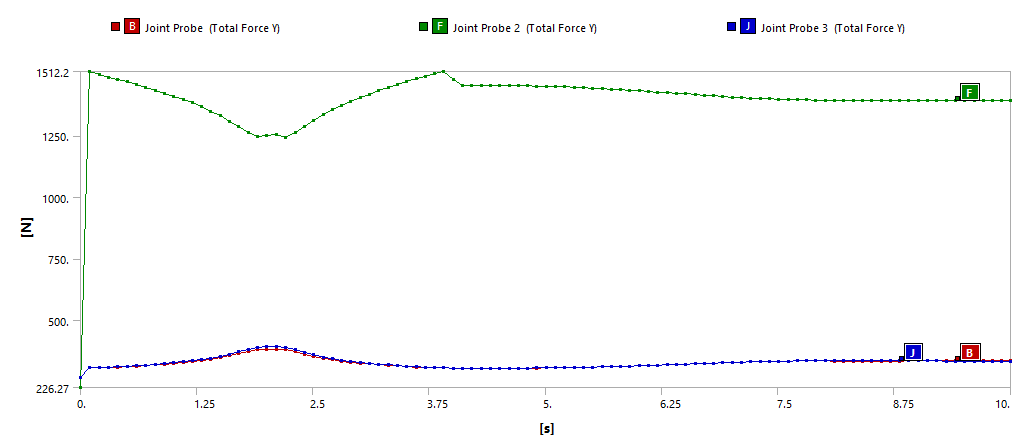
Figura 4: La reacción de la fuerza de las articulaciones traslacionales
Basándose en los resultados de la simulación, los ingenieros pueden introducir modificaciones u optimizaciones en el diseño para mejorar el rendimiento del brazo. Este proceso iterativo de simulación y perfeccionamiento del diseño ayuda a los ingenieros a crear un modelo de brazo robótico que cumpla los criterios de rendimiento deseados.
En general, diseñar y construir un modelo de brazo robótico en ANSYS Motion requiere una combinación de conocimientos de ingeniería mecánica, experiencia en simulación y comprensión de la aplicación prevista del brazo y de los requisitos de rendimiento.
Únase al foro de diseñadores!
Su experiencia es vital para la comunidad. Únase a nosotros y aporte sus conocimientos.
Únase ahora al ForoComparta, aprenda y crezca con los mejores profesionales del sector.