

Únase al foro de diseñadores!
Su experiencia es vital para la comunidad. Únase a nosotros y aporte sus conocimientos.
Únase ahora al ForoComparta, aprenda y crezca con los mejores profesionales del sector.
La creciente popularidad de los vehículos autónomos ha despertado un gran interés investigador en la industria marítima, sobre todo para el desarrollo de buques autónomos de superficie marítima (MASS). Un requisito esencial de los MASS es la capacidad de seguir una trayectoria predeterminada en el mar, teniendo en cuenta factores como los obstáculos, la profundidad del agua y la maniobrabilidad del buque. Cualquier desviación de esta trayectoria, por ejemplo, debido a condiciones meteorológicas adversas, plantea graves riesgos como incidentes de colisión, contacto o encalladura. Por tanto, es deseable que los buques autónomos dispongan de un mecanismo para resistir eficazmente las desviaciones.
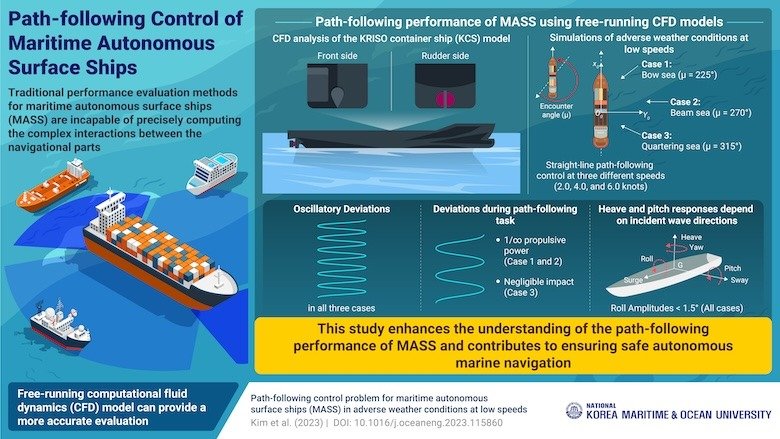
Sin embargo, los métodos actuales para evaluar el rendimiento de seguimiento de la trayectoria de los buques autónomos se basan en modelos matemáticos simplificados de buques. Por desgracia, estos modelos son incapaces de captar las complicadas interacciones entre el casco, la hélice, el timón y las cargas externas de los buques, lo que conduce a estimaciones inexactas del rendimiento de seguimiento de la trayectoria.
Además, en respuesta al Índice de Diseño de Eficiencia Energética de la Organización Marítima Internacional para reducir las emisiones de gases de efecto invernadero, el Comité de Protección del Medio Marino ha proporcionado directrices para determinar la potencia de propulsión mínima necesaria para mantener la maniobrabilidad del buque en condiciones meteorológicas adversas.
A la luz de estas directrices y de la necesidad de evaluar el rendimiento de seguimiento de la trayectoria, un equipo multinacional de investigadores, dirigido por el profesor adjunto Daejeong Kim, de la División de Estudios de Convergencia de la Navegación de la Universidad Nacional Marítima y Oceánica de Corea, ha estudiado recientemente el rendimiento de seguimiento de la trayectoria del MASS utilizando un modelo de dinámica de fluidos computacional (CFD) de funcionamiento libre combinado con el sistema de guiado en la línea de visión (LOS), a bajas velocidades y en condiciones meteorológicas adversas.
«Empleamos un modelo CFD basado en un solucionador de Navier-Stokes con promediado de Reynolds totalmente no lineal y no permanente que puede incorporar efectos viscosos y turbulentos y la resolución de superficie libre crítica para los problemas de seguimiento de trayectoria, lo que permite una mejor predicción del rendimiento del seguimiento de trayectoria», elabora el Dr. Kim. Sus resultados se publicaron en Internet el 25 de septiembre de 2023 y en el volumen 287, parte 2, de la revista Ocean Engineering el 1 de noviembre de 2023.
El equipo empleó el análisis basado en CFD en el popular modelo de portacontenedores KRISO equipado con el sistema de guiado autónomo LOS. Las condiciones meteorológicas adversas se modelaron como perturbaciones de la proa, la manga y las olas de mar en cuarto, y estos tres casos se estudiaron a tres velocidades diferentes para identificar el efecto de las velocidades de proa en el rendimiento de seguimiento de la trayectoria.
Las simulaciones revelaron que el buque experimentaba desviaciones oscilatorias en los tres casos. En el caso de las olas de proa y manga, estas desviaciones disminuyeron con un aumento de la potencia de propulsión. Curiosamente, en el caso de las olas en cuarto, hubo un efecto insignificante de la potencia de propulsión sobre las desviaciones. Además, las respuestas de oleaje y cabeceo del barco se vieron muy influidas por la dirección de las olas incidentes. Además, en los tres casos, las amplitudes de balanceo fueron sistemáticamente inferiores a 1,5°. Sin embargo, el equipo no pudo determinar la eficacia de aumentar la velocidad para mejorar el rendimiento de seguimiento de la trayectoria.
Explicando las implicaciones de estos hallazgos, el Dr. Kim afirmó: «El modelo propuesto basado en CFD puede suponer una valiosa contribución a la mejora de la seguridad de la navegación marina autónoma. Además, también puede ofrecer alternativas de bajo coste a los experimentos de funcionamiento libre a escala de modelo o a las pruebas en el mar a escala real.»
En resumen, este estudio sienta las bases para analizar el rendimiento de seguimiento de la trayectoria del MASS a baja velocidad en condiciones meteorológicas adversas y podría contribuir a garantizar una navegación marítima autónoma más segura.
Únase al foro de diseñadores!
Su experiencia es vital para la comunidad. Únase a nosotros y aporte sus conocimientos.
Únase ahora al ForoComparta, aprenda y crezca con los mejores profesionales del sector.