

Rejoignez le forum des designers !
Votre expertise est essentielle pour la communauté. Rejoignez-nous et apportez vos connaissances !
Rejoindre le forum maintenantPartagez, apprenez et évoluez avec les meilleurs professionnels du secteur.
RÉSUMÉ
Pour les utilisateurs d’Ansys Mechanical, le passage à Ansys Motion peut déboucher sur de nouvelles fonctionnalités puissantes – mais cette transition ne se limite pas à la navigation dans une interface familière. Bien que les deux outils partagent le même environnement graphique, ils s’appuient sur des solveurs et des approches de modélisation fondamentalement différents. Il est essentiel de comprendre ces différences conceptuelles pour exploiter efficacement Ansys Motion et éviter les pièges les plus courants. Que vous cherchiez à élargir votre champ de simulation ou à améliorer vos flux de travail actuels, savoir où finit Mechanical et où commence Motion est la clé d’une intégration réussie et efficace. Dans ce blog, nous allons explorer ces distinctions critiques pour aider les utilisateurs de Mechanical à entrer en toute confiance dans le monde de la dynamique multi-corps.
Dans ce blog, nous ne nous concentrerons pas sur des détails de configuration spécifiques. L’objectif est plutôt de mettre en évidence les différences de flux de travail entre Ansys Mechanical et Ansys Motion. Bien que les deux outils fassent partie du même écosystème de simulation, ils reposent sur des philosophies de modélisation différentes. Cela signifie que pour utiliser Ansys Motion efficacement, les utilisateurs de Mechanical doivent adapter leur approche habituelle. Nous explorerons les concepts clés et les ajustements indispensables pour réussir la transition des flux de travail et exploiter pleinement les capacités d’Ansys Motion.
Caractéristiques uniques de la configuration de Motion
En réfléchissant à la manière dont les choses sont définies dans Motion, il est possible d’identifier deux différences principales par rapport à Mechanical :
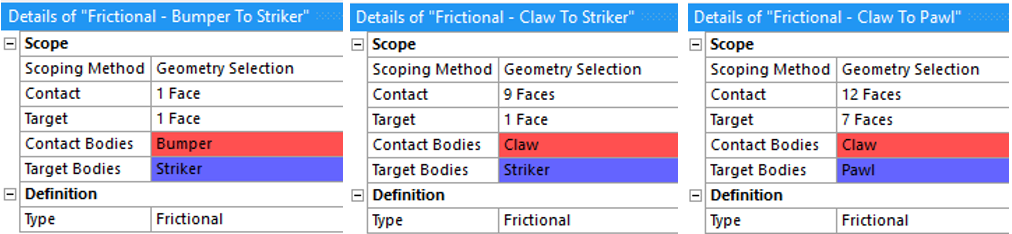
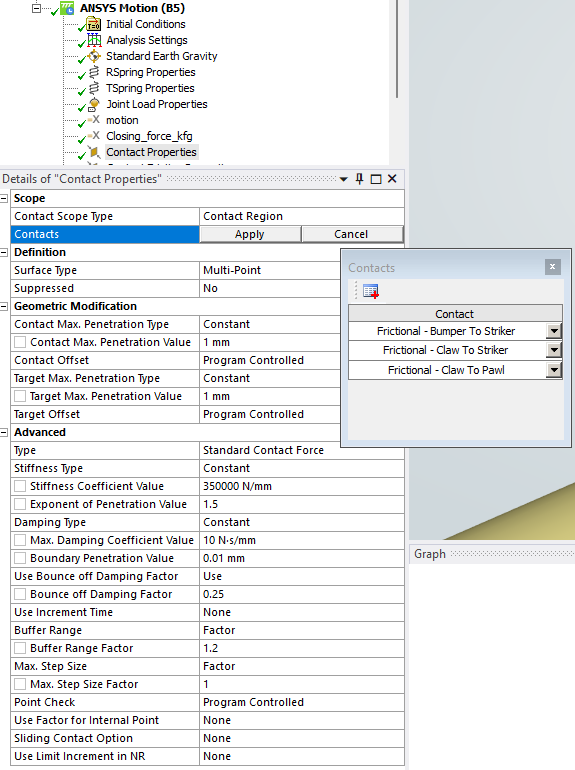
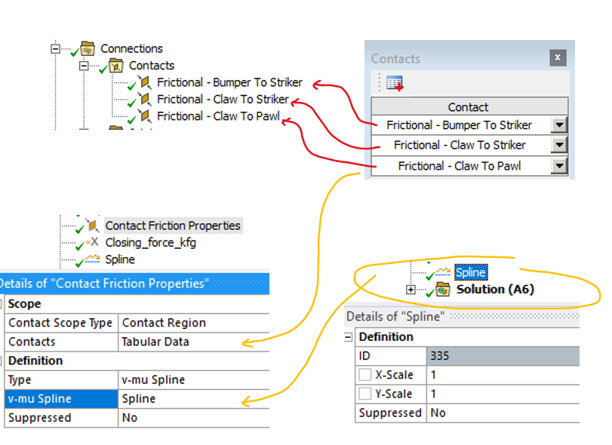
- Définitions de propriétés groupées : Dans Motion, il est possible de définir les propriétés de plusieurs objets similaires à l’aide d’un objet Propriétés indépendant qui s’applique à l’ensemble du groupe. L’objectif est ici d’éviter de définir des valeurs égales pour chaque objet individuel. Imaginez un modèle avec des dizaines de contacts et vous devez définir des propriétés de frottement similaires pour chacun d’entre eux. Si vous travaillez sur Mechanical, vous devrez définir le coefficient de frottement dans chaque section de propriétés de contact. Dans Motion, en créant un objet de propriétés de contact, vous pouvez pointer toutes les paires de contacts souhaitées en définissant les valeurs une seule fois.Dans cet exemple, nous pouvons voir un modèle avec trois contacts définis pour prendre en compte l’interaction entre plusieurs pièces. Dans cette configuration, il y a deux objets Motion destinés à définir les propriétés numériques et de frottement. Par rapport à Mechanical, une définition complète serait nécessaire dans chaque objet de contact.

Définition du contact :
Objet de propriétés de contact : Notez que le champ d’application est une liste comprenant les trois objets de contact définis.
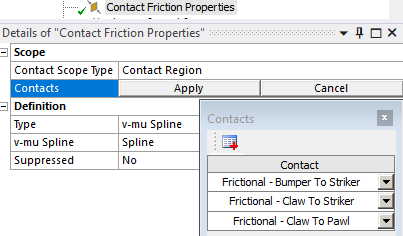
Propriétés de friction du contact :
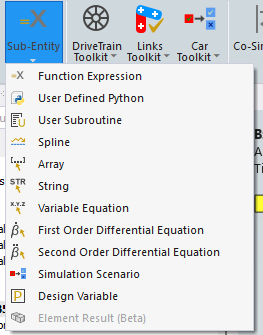
- Utilisation des fonctions : La deuxième différence majeure est la manière de créer des fonctions. Dans Mechanical, vous pouvez définir des fonctions de base directement sur l’objet (par exemple pour définir une force variable dans le temps). Dans Motion, le menu Sub-Entity permet de créer des fonctions plus avancées. Une explication plus détaillée des fonctions disponibles peut être trouvée dans l’aide d’Ansys : https://ansyshelp.ansys.com/account/secured?returnurl=/Views/Secured/corp/v251/en/motion_ug/motion_ug_using_motionfeat.html
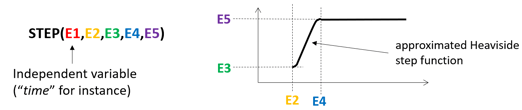
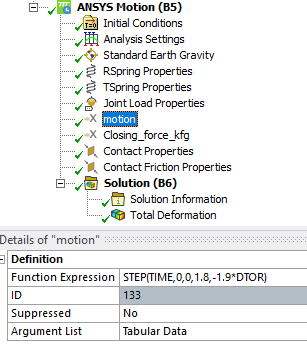
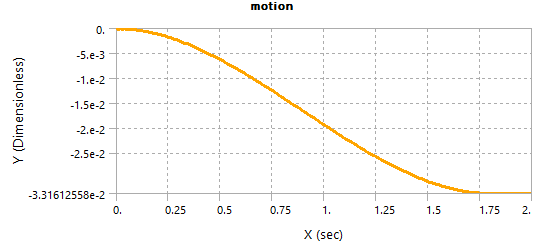
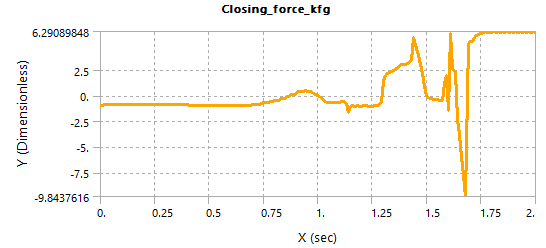
En poursuivant l’exemple, deux fonctions ont été créées à l’aide de l’objet « Function Expression ». La première définit un déplacement de rotation pour une articulation. La seconde fonction calcule le couple de réaction sur une articulation de révolution.Expression de la fonction : STEP. Cette fonction crée une transition en douceur entre une valeur minimale et une valeur maximale en deux points « temporels ». Notre fonction est destinée à définir une rotation, c’est pourquoi nous convertissons l’argument final en radians à l’aide de la constante DTOR.
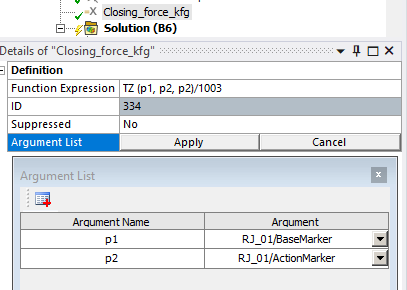
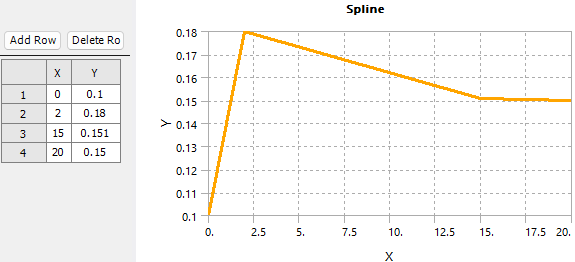
Expression de la fonction : TZ. Cette fonction calcule le couple sur une articulation rotative nommée RJ_01. Elle utilise deux arguments appelés p1 et p2. Ce sont des marqueurs créés automatiquement sur l’articulation. - Définitions imbriquées : Comme vous pouvez l’imaginer, les objets indépendants définis précédemment doivent être assemblés d’une manière ou d’une autre pour compléter la configuration. Dans le modèle de l’exemple, le coefficient de frottement n’est pas constant. Une spline est créée pour définir la variation de ce coefficient en fonction de la vitesse relative. Ensuite, nous avons besoin d’un objet Spline à utiliser dans l’objet de propriétés de frottement de contact et cet objet est utilisé pour définir le comportement des contacts. La logique est la même, même si nous n’avons pas besoin d’une connexion spécifique entre les objets.

CONCLUSION
- Ansys Motion utilise les mêmes fonctions de prétraitement qu’une simulation mécanique standard : géométrie, connexions, contact et maillage.
- Ansys Motion dispose de fonctionnalités spécifiques : propriétés et marqueurs de corps, propriétés de contact, conditions limites et forces spéciales pour les articulations, expressions de variables, boutons de co-simulation, exportation de fichiers et exécution du post-processeur Ansys Motion.
Rejoignez le forum des designers !
Votre expertise est essentielle pour la communauté. Rejoignez-nous et apportez vos connaissances !
Rejoindre le forum maintenantPartagez, apprenez et évoluez avec les meilleurs professionnels du secteur.