

Rejoignez le forum des designers !
Votre expertise est essentielle pour la communauté. Rejoignez-nous et apportez vos connaissances !
Rejoindre le forum maintenantPartagez, apprenez et évoluez avec les meilleurs professionnels du secteur.
L’avenir des transports promet de rendre la vie plus sûre et plus mobile pour tous, avec des résultats économiques positifs. Cependant, pour concrétiser cette promesse, il est nécessaire de tester les nouveaux véhicules et chaque sous-système de leur architecture, d’autant plus que les sous-systèmes deviennent plus intelligents et très complexes.
La complexité accrue nécessite un changement radical des méthodes de test et de nouveaux concepts pour une vérification et une validation complètes des véhicules dans le monde physique et virtuel, ce qui est pris en compte dans de nouvelles réglementations.
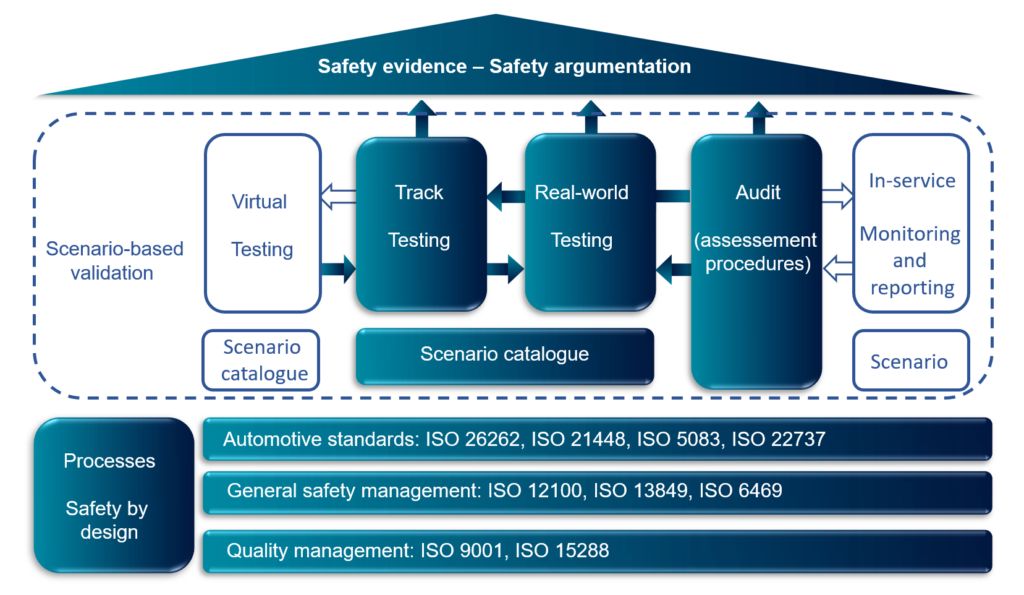
En ce sens, en février 2021, la CEE-ONU (Commission économique des Nations Unies pour l'Europe) a présenté la nouvelle méthode d'évaluation/test pour la conduite automatisée (NATM) – un cadre qui introduit une approche multipilier pour la validation de la sécurité de la conduite automatisée (voir Fig. 1) NATM, Des lignes directrices.
Par ailleurs, en août 2022, la Commission européenne a adopté le règlement 2022/1426 fixant les règles d'application du règlement (UE) 2019/2144 du Parlement européen et du Conseil en ce qui concerne les procédures uniformes et les spécifications techniques pour la réception par type. du système de conduite automatisée (ADS) des véhicules entièrement automatisés 2144, 1426.
Qu'est-ce que la validation de sécurité multipilier de l'AV ?
La validation de sécurité multipilier des véhicules automatisés spécifie 5 piliers de certification, qui soutiennent l'argumentation en matière de sécurité. En plus des trois piliers bien connus (essais sur piste, tests en situation réelle et Audit), le règlement mentionne tests virtuels et suivi en service.
Dans ce blog, la vérification, la validation, la certification et l'assurance sont définies/décrites comme suit :
- Vérification: est une activité qui détermine si un système répond aux exigences, répondant à la question : « Avons-nous correctement construit le système ? »
- Validation: évalue si le système répond aux besoins de l'utilisateur final, en répondant à la question : « Avons-nous construit le bon système ». D'autre part, Validation du modèle évalue dans quelle mesure le modèle représente la réalité.
- Assurance: est une confiance justifiée dans le fait que le système fonctionne comme prévu.
- Attestation: détermine si un système est conforme à un ensemble de critères ou de normes.
Dans le cas des véhicules autonomes, la communauté scientifique s’est rendu compte très tôt que seuls des tests en conditions réelles – utilisant une couverture basée sur le kilométrage – n’étaient pas réalisables, d’un point de vue économique et technique.
L'une des principales raisons est que lors des tests en monde réel, les événements liés à la sécurité se produisent très rarement. Il est donc devenu évident que les tests virtuels joueraient un rôle clé dans la certification des systèmes de conduite automatisée. Le résultat des tests virtuels peut contribuer à l'argumentation de sécurité si et seulement si les simulations sont crédibles, ceci est brièvement discuté dans la section suivante et est détaillé dans NATM, Des lignes directrices.
Évaluation de la crédibilité des tests virtuels et de la simulation
Dans le cas de tests virtuels, nous remplaçons un ou plusieurs éléments physiques par un modèle de simulation.
Les tests virtuels utilisés pour la validation des systèmes de conduite automatisée (ADS) peuvent atteindre différents objectifs, en fonction de la stratégie globale de validation et de la précision des modèles de simulation sous-jacents.
Certains des objectifs pourraient être :
- Fournir une confiance qualitative ou statistique dans la sécurité de l’ensemble du système.
- Fournir une confiance qualitative ou statistique dans les performances de sous-systèmes/composants spécifiques.
- Découvrez des scénarios difficiles à tester dans le monde réel (par exemple, tests réels et tests sur piste).
Contrairement à tous ses avantages potentiels, une limite de cette approche réside dans la fidélité intrinsèque limitée des modèles. Étant donné que les modèles ne peuvent fournir qu’une représentation grossière de la réalité, l’aptitude d’un modèle à remplacer de manière satisfaisante le monde réel pour valider la sécurité des ADS doit être soigneusement évaluée.
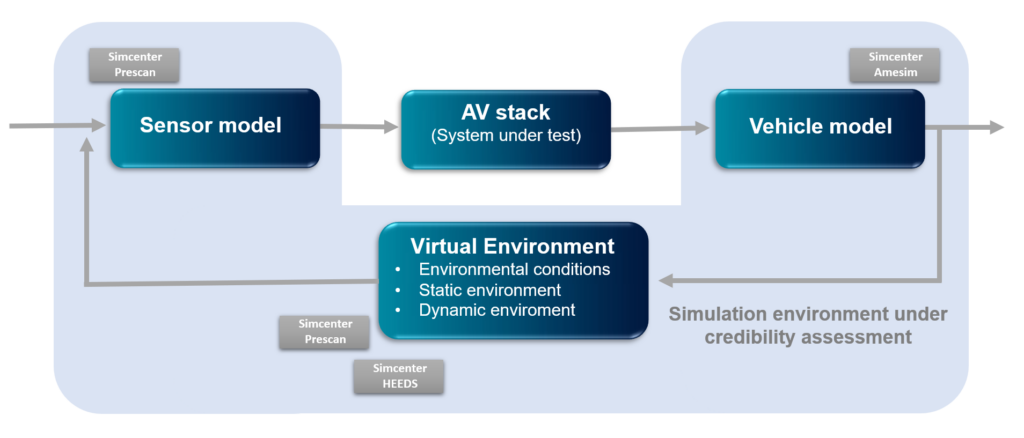
Par conséquent, la crédibilité des modèles de simulation et de l'environnement de simulation présentés sur la figure 2 doit être évaluée pour déterminer la transférabilité et la fiabilité des résultats par rapport aux performances du monde réel.
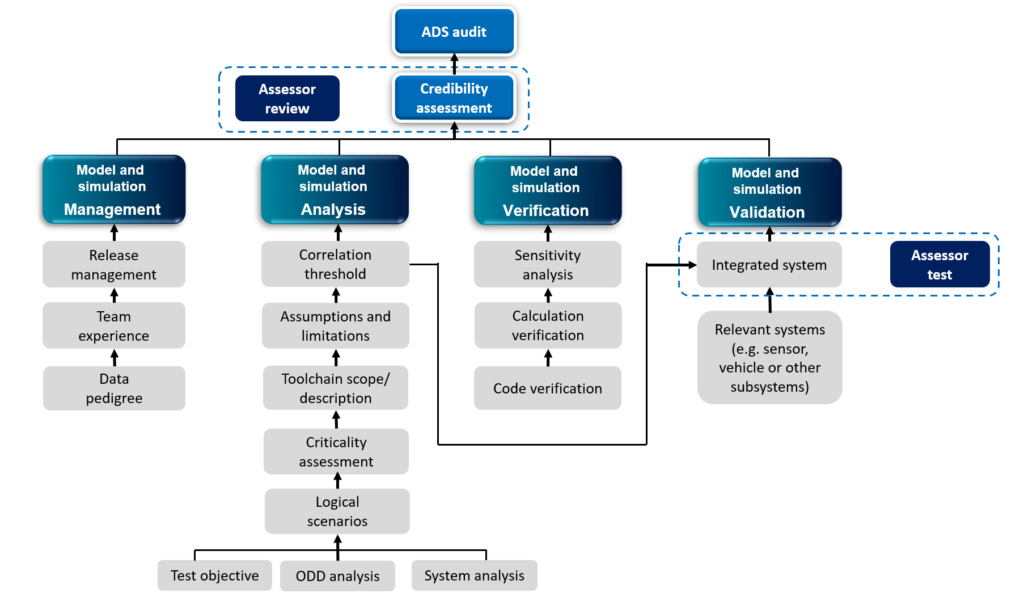
Outre les modèles de simulation et l'environnement de simulation, l'évaluation de la crédibilité est également étendue à la gestion du modèle et de la simulation. Tous ces aspects sont capturés dans la figure 3.
Lire le livre blanc de Siemens
Pour en savoir plus sur les workflows de développement du véhicule autonome, lisez ceci papier blancqui décrit plus en détail :
- Les défis liés au développement de l’AV
- le flux de travail d'ingénierie automobile
- Les tests basés sur des scénarios de véhicules autonomes et les workflows de tests basés sur des scénarios
- Le workflow d'évaluation de la crédibilité de la simulation
Activités en cours et réglementations pertinentes
À partir d'octobre 2022, RDW (l'autorité néerlandaise des véhicules), CCR (Centre commun de recherche de la Commission européenne) et Siemens Industry Software Nederland BV ont travaillé en étroite collaboration pour comprendre comment interpréter et comment appliquer le nouveau règlement, en particulier comment appliquer le cadre d'évaluation de la crédibilité.
Pour une meilleure compréhension, un cas d'utilisation spécifique (service de voiturier automatisé) a été considéré et chaque étape du cadre d'évaluation de la crédibilité de la simulation a été appliquée à ce cas d'utilisation.
Les résultats de ces enquêtes ont été résumés dans un manuel d’évaluation de la crédibilité, qui pourrait servir de ligne directrice aux constructeurs automobiles souhaitant utiliser les tests virtuels comme pilier de certification.
Enfin, pour le lecteur intéressé, un résumé des normes pertinentes et des liens sont fournis dans les tableaux ci-dessous.
Règlement CEE-ONU :
| Numéro de règlement | Nom du règlement | But |
| Accord de 1958 | ECE/TRANS/WP.29/2016/2 | Accord concernant l'adoption de règlements techniques harmonisés des Nations Unies relatifs aux véhicules à roues, aux équipements et aux pièces pouvant être montés et/ou utilisés sur des véhicules à roues et les conditions de reconnaissance réciproque des agréments accordés sur la base de ces règlements des Nations Unies |
| R155 | E/ECE/TRANS/505/Rev.3/Add.154 | Dispositions uniformes concernant l'homologation des véhicules en matière de cybersécurité et de système de gestion de la cybersécurité |
| R156 | ECE/TRANS/WP.29/2020/80 | Dispositions uniformes concernant l'homologation des véhicules en ce qui concerne la mise à jour des logiciels et le système de gestion des mises à jour des logiciels |
| R157 | ECE/TRANS/WP.29/2020/81 | Prescriptions uniformes concernant l'homologation des véhicules en ce qui concerne les systèmes automatisés de maintien de voie |
| NATM | ECE/TRANS/WP.29/2021/61 | Nouvelle méthode d'évaluation/test pour la conduite automatisée (NATM) Lignes directrices pour la validation du système de conduite automatisée (ADS) |
| Des lignes directrices | ECE/TRANS/WP.29-187-10/2022 | Lignes directrices et recommandations concernant les exigences de sécurité pour les systèmes de conduite automatisés |
Réglementation européenne :
| Numéro de règlement | Nom du règlement | But |
| 858 | RÈGLEMENT (UE) 2018/858 DU PARLEMENT EUROPÉEN ET DU CONSEIL | Réception par type et surveillance du marché des véhicules à moteur et de leurs remorques, ainsi que des systèmes, composants et entités techniques distinctes destinés à ces véhicules |
| 2144 | RÈGLEMENT (UE) 2019/2144 DU PARLEMENT EUROPÉEN ET DU CONSEIL | Exigences en matière de réception par type des véhicules à moteur et de leurs remorques, ainsi que des systèmes, composants et entités techniques distinctes destinés à ces véhicules, en ce qui concerne leur sécurité générale et la protection des occupants du véhicule et des usagers vulnérables de la route |
| 168 | RÈGLEMENT (UE) N° 168/2013 DU PARLEMENT EUROPÉEN ET DU CONSEIL | Homologation et surveillance du marché des véhicules à deux ou trois roues et quadricycles |
| 1426 | RÈGLEMENT D'EXÉCUTION (UE) 2022/1426 DE LA COMMISSION | Fixant les règles d'application du règlement (UE) 2019/2144 du Parlement européen et du Conseil en ce qui concerne les procédures uniformes et les spécifications techniques pour la réception par type du système de conduite automatisée (ADS) des véhicules entièrement automatisés |
Participation de Siemens à des projets européens
Outre les activités de recherche en cours menées par Siemens, RDW et JRC sur une approche multipilier pour la validation de la sécurité des véhicules automatisés, Siemens est impliqué dans les projets européens suivants :
- FOCÉTA (FOfondations pour Ccontinu Eingénierie de Tinoxydable UNautonomie)
Convergence de l'ingénierie basée sur les données et basée sur les modèles. La percée scientifique ciblée sous-jacente de FOCÉTA réside dans la convergence des approches basées sur les modèles et celles basées sur les données. Cette convergence est encore compliquée par la nécessité d’appliquer la vérification et la validation de manière progressive et d’éviter des efforts complets de revérification et de revalidation. - AIthéna (Projet financé par l'UE numéro 101076754). AIthéna est un projet de recherche et d'innovation sur Cconnecté et Ccoopérative UNautomatisé Msolutions de mobilité (CCAM) qui visent à créer des technologies CCAM fiables, explicables et responsables.
- ParcUrbainSmart (premier projet au sein de «KIC Mobilité Urbaine», une initiative européenne soutenue par l’EIT, l’Institut Européen d’Innovation et de Technologie). ParcUrbainSmart Le projet se concentre sur le développement d'un stationnement automatisé sur rue en centre-ville offrant une large gamme de services possibles liés au stationnement. Lis ça Blog pour en savoir plus.
- LEVER DU SOLEIL (Actions de recherche et d'innovation Horizon, projet n° 101069573, appel HORIZON-CL5-2021-D6-01). Le LEVER DU SOLEIL Le projet vise à établir un cadre commun d’assurance de la sécurité, interconnectant les silos et les faisant collaborer de manière harmonisée.
- DITM (Dnumérique jeinfrastructure à l’épreuve du temps Mmobilité, programme financé par NextGenerationEU). Visant à prendre en charge les systèmes de conduite automatisée, le DITM les partenaires développent une architecture système pour l'infrastructure numérique, y compris les technologies de base essentielles associées à la localisation, aux services de trafic, aux cartes numériques, à l'infrastructure de recharge et à la validation continue de la sécurité.
Pour en savoir plus sur le projet, contactez Alexandru Forrai ([email protected]), Ph.D., collègue ingénieur et consultant chez Siemens Digital Industries Software.
Rejoignez le forum des designers !
Votre expertise est essentielle pour la communauté. Rejoignez-nous et apportez vos connaissances !
Rejoindre le forum maintenantPartagez, apprenez et évoluez avec les meilleurs professionnels du secteur.