

Rejoignez le forum des designers !
Votre expertise est essentielle pour la communauté. Rejoignez-nous et apportez vos connaissances !
Rejoindre le forum maintenantPartagez, apprenez et évoluez avec les meilleurs professionnels du secteur.
Découvrez la puissance d’ANSYS Motion pour simuler la dynamique de l’assemblage d’un bras de robot et optimiser ses performances.
Comprendre ANSYS Motion et ses capacités
ANSYS Motion est un logiciel de simulation robuste qui permet aux ingénieurs d’analyser et de prédire le comportement des systèmes mécaniques, y compris les bras de robots. En utilisant ANSYS Motion, les ingénieurs peuvent simuler le mouvement et la dynamique des bras de robots, ce qui leur permet d’acquérir une compréhension complète de la façon dont le bras se déplace et réagit dans différentes conditions.
L’un des principaux atouts d’ANSYS Motion réside dans la modélisation et la simulation précises des interactions complexes entre les différents composants d’un bras de robot, tels que les articulations, les liaisons et les actionneurs. Cette capacité permet aux ingénieurs d’évaluer les performances du bras et d’identifier les domaines potentiels d’amélioration ou les problèmes.
De plus, ANSYS Motion fournit une large gamme d’outils d’analyse et de fonctionnalités qui permettent aux ingénieurs d’étudier l’impact de différents facteurs sur les performances d’un bras robotisé. Il s’agit notamment d’examiner les effets de diverses stratégies de contrôle, d’optimiser la trajectoire du bras et d’évaluer sa stabilité et sa sécurité.
Nos bras robotiques sont spécialement conçus pour manipuler sans effort des objets à l’aide d’actionneurs linéaires reliés à des blocs positionnés sur des rails. Cette conception innovante permet aux bras de manipuler des objets de manière transparente grâce à une combinaison de mouvements de blocs. Dans cette démonstration, le bras démontrera ses capacités en transportant une masse de 85 kg.
Conception et construction d’un modèle de bras de robot dans ANSYS Motion
La création d’un modèle de bras de robot dans ANSYS Motion nécessite un processus étape par étape. Tout d’abord, les ingénieurs doivent recueillir des informations essentielles sur le bras, telles que ses dimensions, ses matériaux et ses composants mécaniques. Ces données servent de base au développement d’un modèle 3D précis à l’aide des outils de conception 3D d’ANSYS.
Après avoir créé le modèle 3D, les ingénieurs ont la possibilité de spécifier la structure cinématique du bras, en déterminant la quantité et le type d’articulations et de connexions, ainsi que l’amplitude de mouvement de chaque articulation. ANSYS Motion peut ainsi simuler avec précision le mouvement et la dynamique du bras.
Pour simuler le tripteron, nous utilisons une articulation fixe pour maintenir le rail en place. En outre, trois articulations de translation permettent au bras robotique de se déplacer, ainsi que six articulations de révolution qui établissent des connexions entre les bras et l’ensemble du système, imitant ainsi les roulements. Reportez-vous à la figure 1 pour une représentation visuelle de cette configuration.
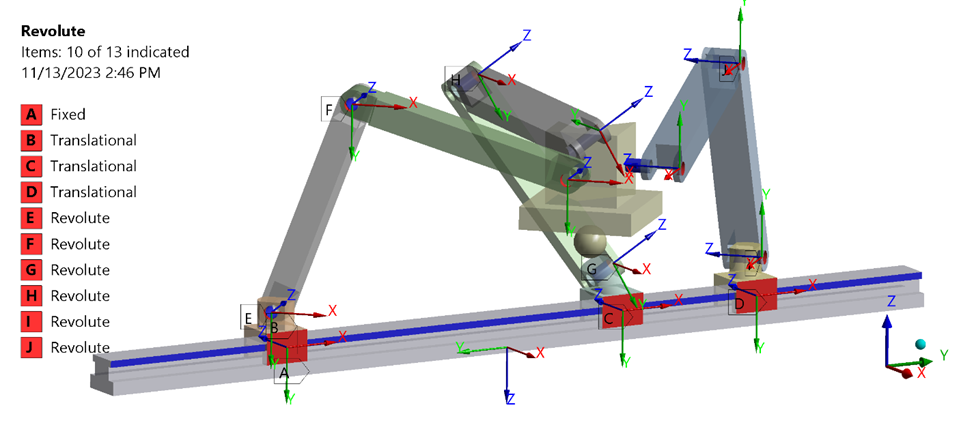
Figure 1 : Définitions des articulations du système robotique
Ensuite, les ingénieurs doivent définir les actionneurs du bras, tels que les moteurs ou les systèmes hydrauliques, ainsi que les stratégies de contrôle correspondantes. ANSYS Motion peut ainsi simuler l’actionnement du bras et sa réponse aux signaux de commande.
Comme le montre la figure 2, nous avons des expressions de fonctions qui définissent les mouvements de chaque bloc afin de pouvoir contrôler l’objet dans l’espace cartésien.
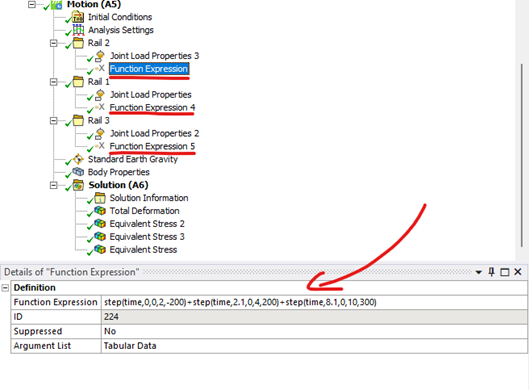
Figure 2 : Définition d’une expression de fonction
En outre, le modèle comprend également un objet de propriété du corps, comme le montre la figure 3. Cette fonctionnalité fournie par ANSYS Motion permet des simulations plus rapides que les solveurs ordinaires. En changeant la définition du corps de corps nodal à corps modal, le solveur peut effectuer une analyse modale pour les corps spécifiques auxquels il s’applique. Cette analyse dynamique multicorps efficace utilise les informations de rigidité pour calculer avec précision les contraintes et les déformations sur les corps.
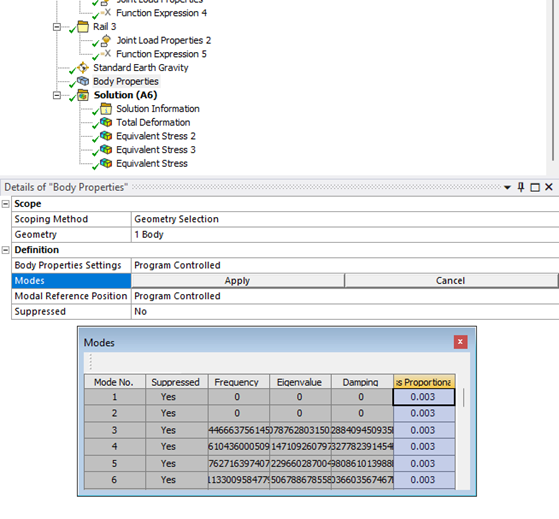
Figure 3 : Définition de l’objet de propriété du corps
Une fois la structure cinématique et les actionneurs du bras définis, les ingénieurs peuvent effectuer des simulations dans ANSYS Motion afin d’analyser en profondeur les performances du bras. Cette analyse comprend l’évaluation du mouvement, des forces, des couples et d’autres paramètres dynamiques dans divers scénarios opérationnels.
Les résultats des contraintes, des déformations et des contraintes peuvent être représentés dans le domaine temporel, comme le montre l’animation 1 ci-dessous, afin d’optimiser les performances des bras robotisés.
Animation 1 : Résultat des contraintes dans le domaine temporel
Les forces que les trois actionneurs doivent appliquer pour manipuler l’objet peuvent être analysées et tracées pour choisir les actionneurs, comme le montre la figure 4. En outre, divers mouvements, forces, couples et autres paramètres dynamiques peuvent être créés et tracés dans différentes conditions de fonctionnement afin d’améliorer l’efficacité du système.
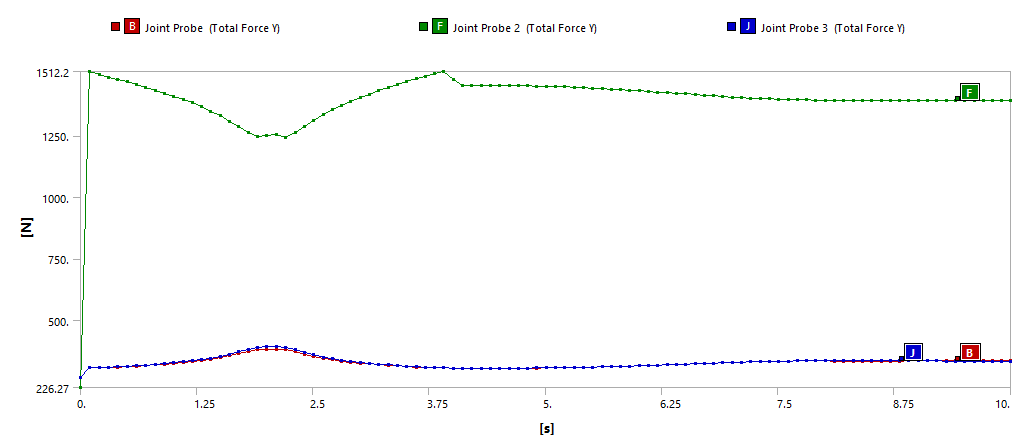
Figure 4 : La réaction de force des articulations de translation
Sur la base des résultats de la simulation, les ingénieurs peuvent alors modifier ou optimiser la conception afin d’améliorer les performances du bras. Ce processus itératif de simulation et d’affinement de la conception aide les ingénieurs à créer un modèle de bras robotisé qui répond aux critères de performance souhaités.
Dans l’ensemble, la conception et la construction d’un modèle de bras de robot dans ANSYS Motion nécessitent une combinaison de connaissances en ingénierie mécanique, d’expertise en simulation et de compréhension de l’application prévue du bras et des exigences de performance.
Rejoignez le forum des designers !
Votre expertise est essentielle pour la communauté. Rejoignez-nous et apportez vos connaissances !
Rejoindre le forum maintenantPartagez, apprenez et évoluez avec les meilleurs professionnels du secteur.