

Rejoignez le forum des designers !
Votre expertise est essentielle pour la communauté. Rejoignez-nous et apportez vos connaissances !
Rejoindre le forum maintenantPartagez, apprenez et évoluez avec les meilleurs professionnels du secteur.
ANSYS MAXWELL : MOTEUR À FLUX AXIAL PARAMÉTRISÉ
Bonjour, ventilateurs à moteur à flux axial :
Dans ce blog, j'explique comment paramétrer les moteurs à flux axial dans Ansys Maxwell afin que vous puissiez analyser différentes conceptions et obtenir la conception optimisée pour votre application. Les sujets abordés sont,
- Paramétrage de la géométrie
- Symétrie
- Circuit de commande du moteur
- Polarité d'excitation
- Opérations de maillage
- Configuration de l'analyse
- Analyse post-traitement
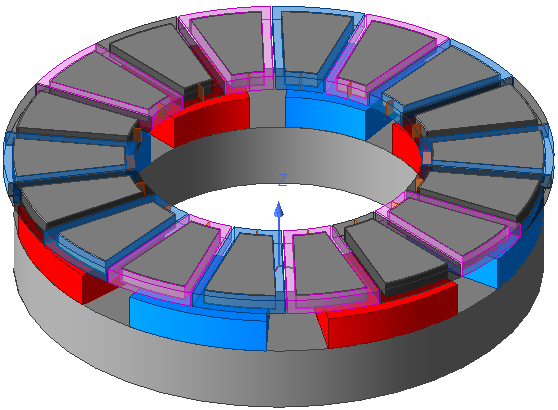
Paramétrage de la géométrie
Il existe en réalité deux catégories de variables pour créer (1) radiale et (2) élévation. La clé du paramétrage du modèle est de
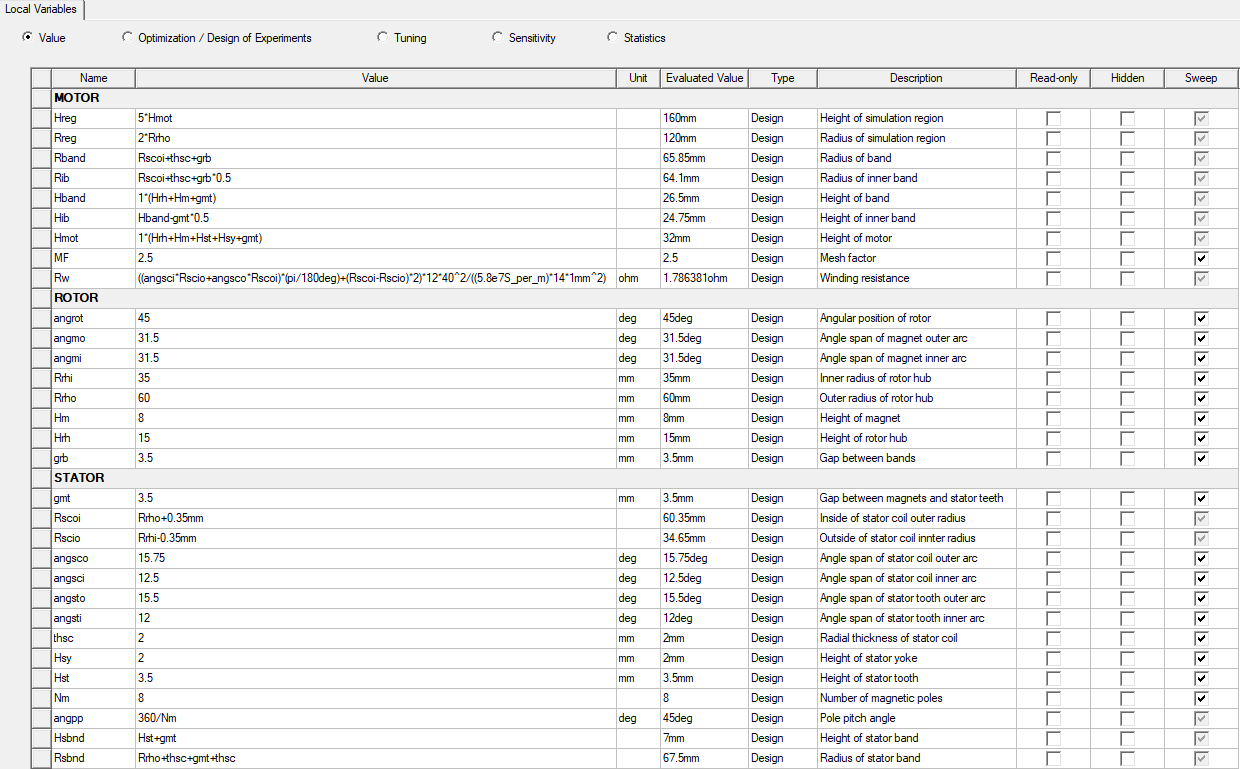
- Créez des variables pour toutes les quantités géométriques et exprimez autant que possible les variables en termes d'autres variables. Par exemple, les rayons extérieurs peuvent être exprimés en rayon intérieur et en épaisseur. Ci-dessous la liste des variables géométriques utilisées pour paramétrer le modèle dans l'exemple de ce blog.
- Définissez les directions radiales et d'élévation. Dans cet exemple, le plan xy du système de coordonnées global est utilisé comme plan de référence pour élever tous les objets et la direction z est le long de l'axe du moteur. Le flux de travail utilisé pour créer la géométrie consiste à placer la surface inférieure de chaque objet sur le plan xy (perpendiculaire à l'axe du moteur, parallèle à la direction radiale), puis à élever (déplacer) les objets dans la direction de l'axe du moteur jusqu'à la valeur requise. position.
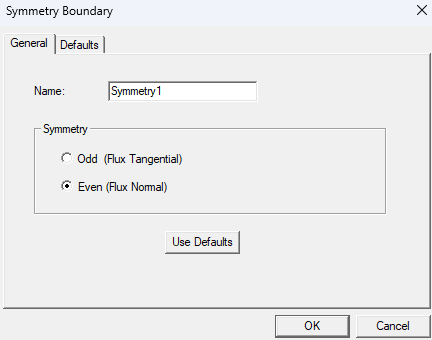
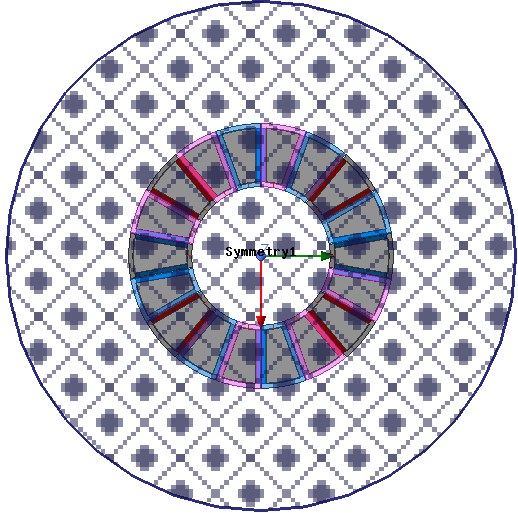
Symétrie
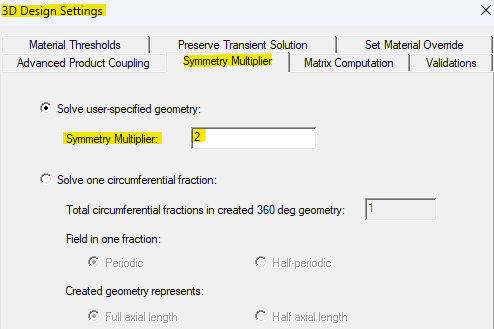
Ce moteur à flux axial est de type double rotor et un modèle à demi-symétrie est utilisé. Le plan de symétrie traverse le centre des bobines du stator et la symétrie « paire » est sélectionnée puisque le flux magnétique est perpendiculaire (normal) à ce plan. Accédez aux paramètres de conception 3D et assurez-vous que le multiplicateur de symétrie est appliqué avec la valeur correcte. Dans un prochain blog (à venir), je discuterai de l'utilisation de l'option de multiplicateur de symétrie « Résoudre une fraction circonférentielle ».

Circuit de commande du moteur : tension d'onde carrée triphasée, courant continu sans balais
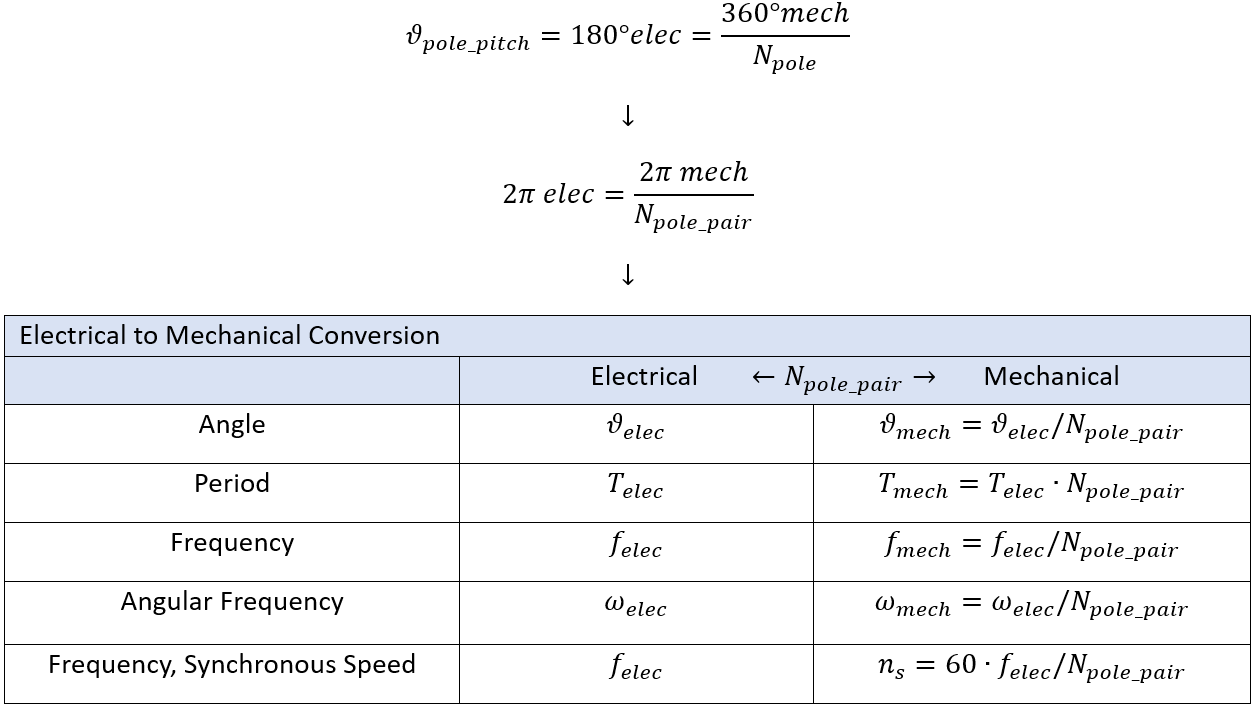
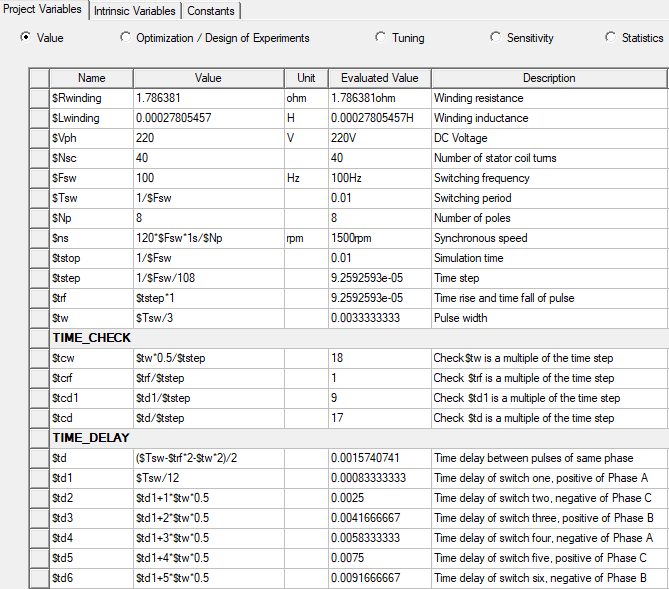
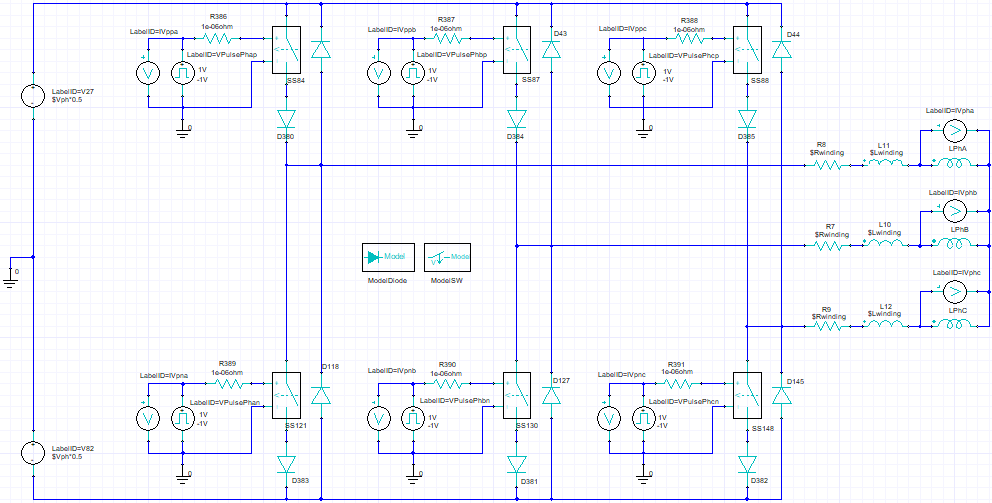
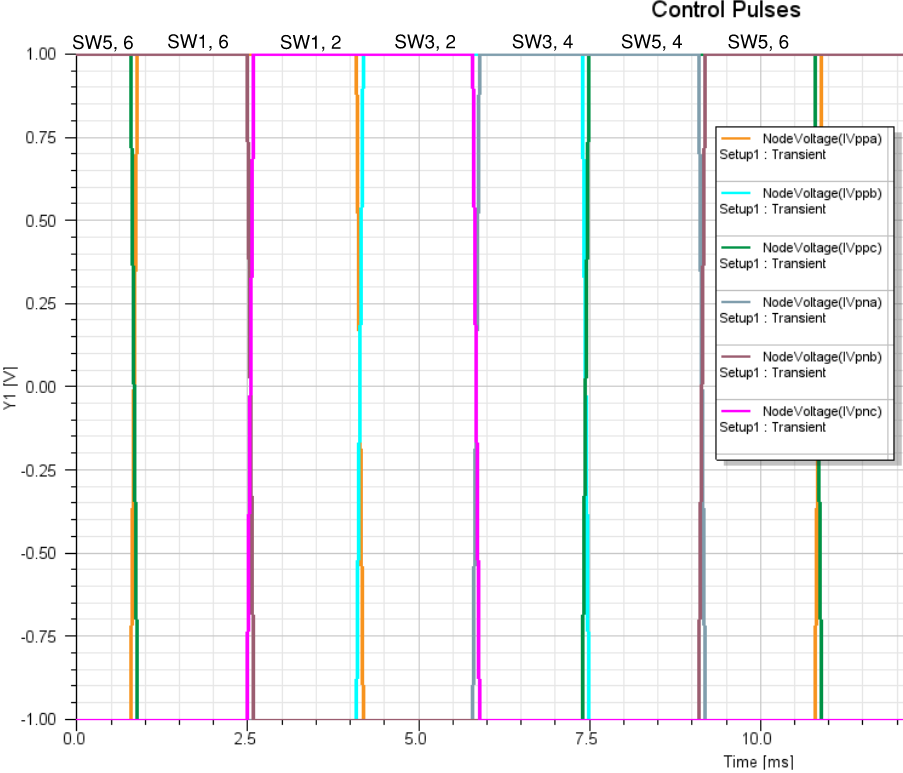
Vous trouverez ci-dessous les relations entre les angles électriques et mécaniques, les fréquences et les périodes temporelles. Les commutateurs sont contrôlés en fonction du TEMPS. Si POS (position) est utilisé pour contrôler les commutateurs, alors les angles mécaniques doivent être utilisés comme entrées et ceux-ci sont convertis en longueur d'arc à l'aide des variables Kle et Kang (non couvertes ici). La largeur d'impulsion, la période et le retard de phase sont indiqués dans le tableau ci-dessous. Vous trouverez également ci-dessous une illustration des impulsions de commande, du schéma du circuit de commande et des variables utilisées.

Polarité d'excitation
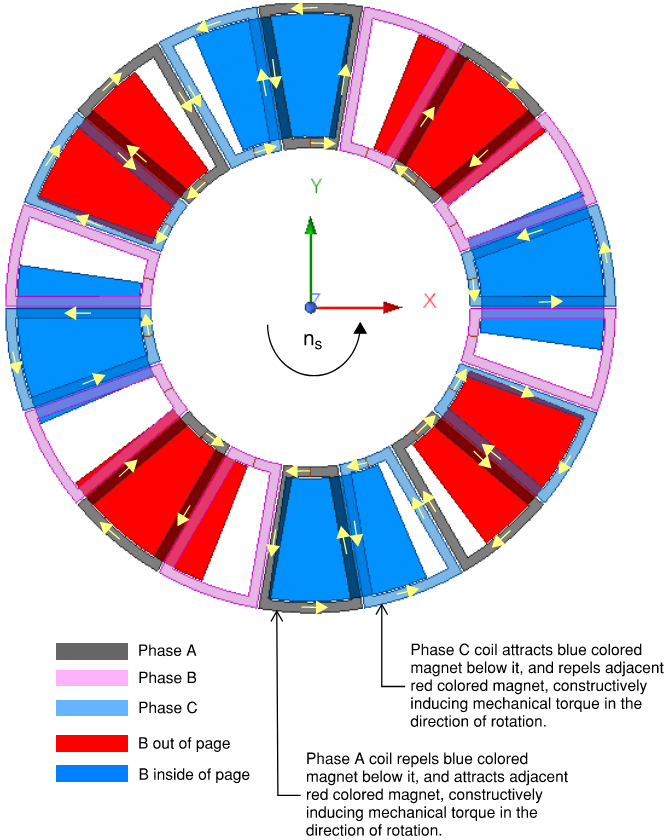
Le couple mécanique est induit sur le rotor (aimants) par le champ du stator et est opposé au couple EM induit sur les bobines du stator par les aimants. Lorsqu'une bobine est alimentée et située entre deux aimants adjacents, elle attirera l'un des aimants et repoussera l'autre aimant. Les bobines doivent être excitées de telle sorte que toutes les bobines induisent des couples mécaniques dans la même direction afin que la rotation se développe dans la direction du champ synchrone (stator). Une bobine ne contribue pas au couple lorsqu'elle est alignée symétriquement avec un aimant. L'affectation de polarité des bobines doit être choisie en fonction de l'ordre des phases sélectionné. En outre, il est important d’utiliser la résistance d’enroulement correcte dans un circuit d’excitation externe. La position initiale est un autre paramètre important à considérer puisque les enroulements ont une impédance et les bobines mettent un certain temps à être alimentées. Vous trouverez ci-dessous une illustration lorsque la phase A et la phase C sont sous tension, les interrupteurs 1 et 2 sont instantanément fermés.
Opérations de maillage
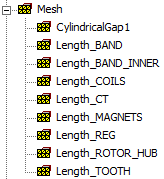
Les opérations de maillage ont été appliquées à chaque type d'objet (entité géométrique unique), comme indiqué ci-dessous. Assurez-vous que les unités correctes sont appliquées pour la valeur évaluée de la taille « Longueur maximale » dans les propriétés de l'opération de maillage.
Configuration de l'analyse
Faites un clic droit sur « Analyse » et sélectionnez « Ajouter une configuration de solution ». Appliquez un « Stop Time » (temps de simulation) et un « Time Step » (période électrique divisée par 100 dans cet exemple). Dans l'onglet « Enregistrer le champ », sélectionnez « Chaque » et vérifiez l'heure d'enregistrement finale. Dans l’onglet « Solveur », cochez « Courbe BH lisse ».
Analyse post-traitement
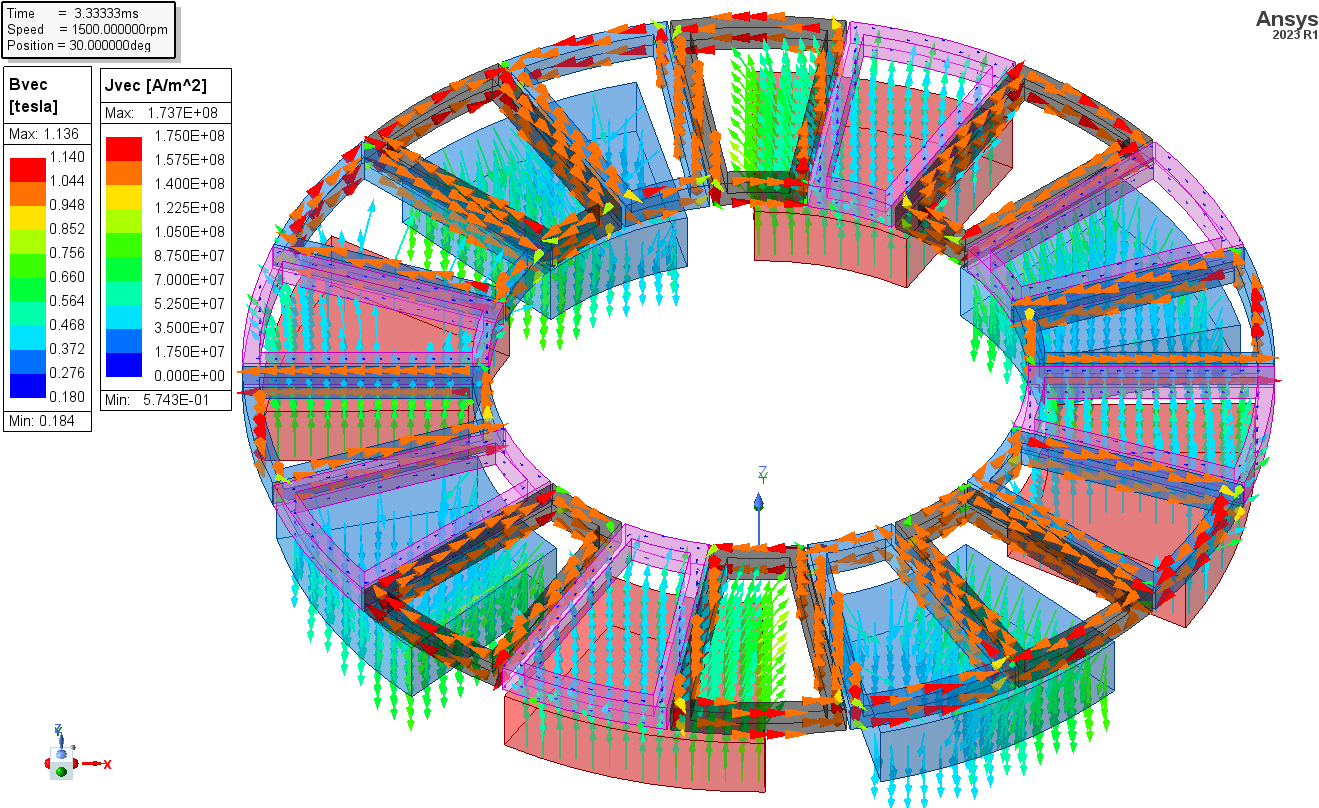
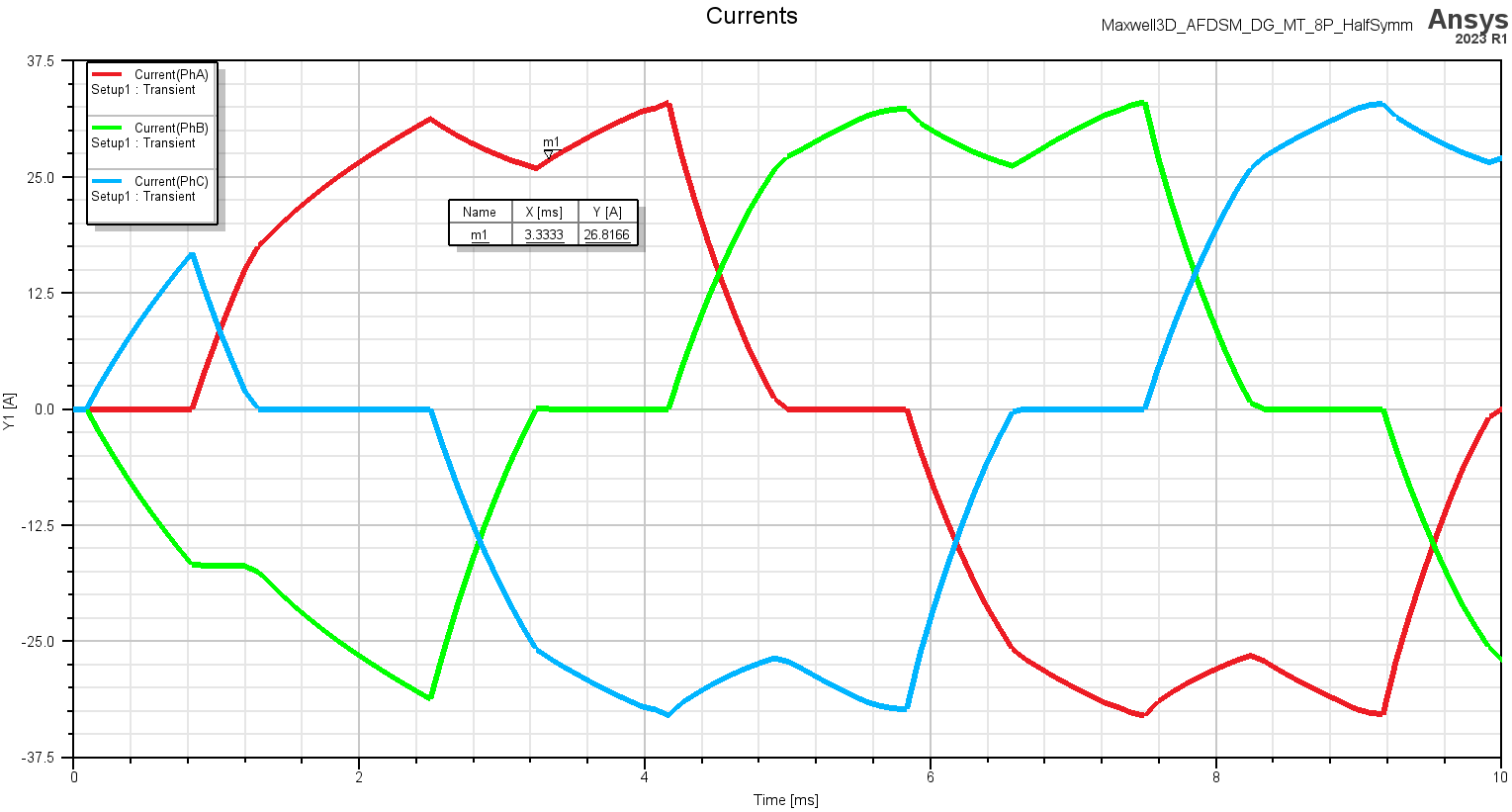
Vous trouverez ci-dessous des tracés de champ de la densité de flux magnétique des aimants et de la densité de courant des bobines du stator. Il est clair que le couple mécanique sera induit sur le rotor dans la direction z positive (dans le sens inverse des aiguilles d'une montre de cette vue) en fonction du champ B des aimants et de la densité de courant dans les enroulements du stator. De plus, les courants triphasés sont affichés dans le tracé 1D ci-dessous. La physique du principe de fonctionnement du couple est telle qu'expliquée dans la section « Polarité d'excitation » ci-dessus.
Rejoignez le forum des designers !
Votre expertise est essentielle pour la communauté. Rejoignez-nous et apportez vos connaissances !
Rejoindre le forum maintenantPartagez, apprenez et évoluez avec les meilleurs professionnels du secteur.