

デザイナーのためのフォーラムに参加しよう
あなたの専門知識はコミュニティにとって不可欠です。私たちに参加して、あなたの知識を提供してください。
今すぐフォーラムに参加する業界最高のプロフェッショナルと分かち合い、学び、成長する.
交通の未来は、すべての人の生活をより安全にし、より移動しやすくし、プラスの経済効果をもたらすことが約束されています。 ただし、その約束を実現するには、特にサブシステムがよりスマートになり、非常に複雑になるにつれて、新しい車両とそのアーキテクチャのすべてのサブシステムをテストする必要があります。
複雑さの増大により、テスト方法の根本的な変更と、物理世界と仮想世界の両方で包括的な車両の検証と妥当性確認のための新しいコンセプトが必要となり、これは新しい規制に取り込まれます。
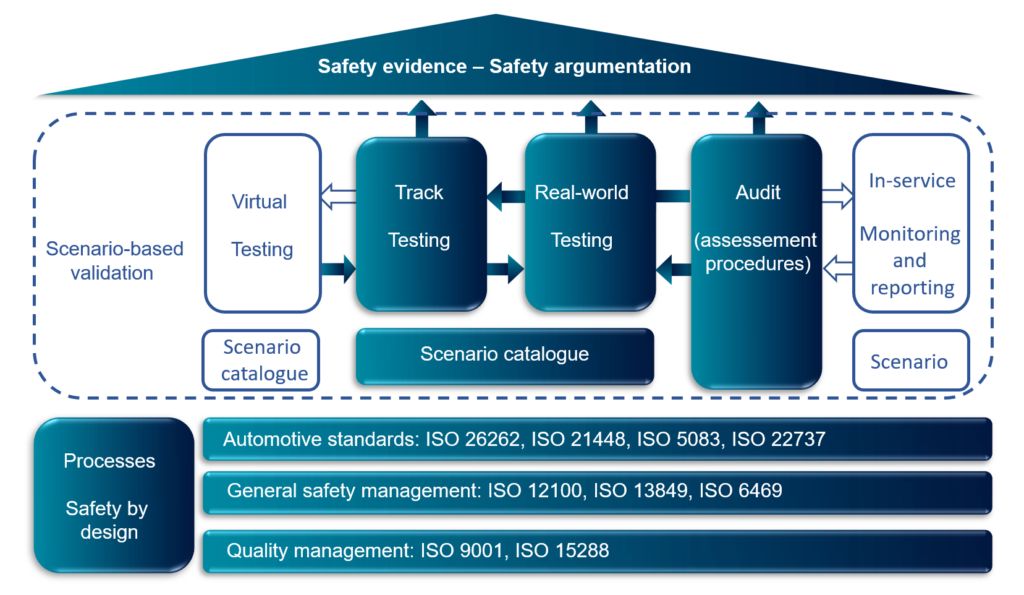
この意味で、2021 年 2 月、UNECE (国連欧州経済委員会) は、自動運転の安全性検証に複数の柱からなるアプローチを導入するフレームワークである自動運転の新しい評価/テスト方法 (NATM) を発表しました (参照)図1) NATM、 ガイドライン。
さらに、2022年8月にEU委員会は、型式承認のための統一手順と技術仕様に関する欧州議会および欧州理事会の規則(EU)2019/2144の適用規則を定める規則2022/1426を採択した。完全自動運転車の自動運転システム(ADS)の 2144、 1426。
AV の複数の柱による安全性検証とは何ですか?
自動運転車の複数の柱による安全性検証では、安全性の議論を裏付ける 5 つの認証の柱が指定されています。 有名な 3 つの柱に加えて (トラックテスト、 現実世界でのテスト そして 監査)、規制では次のように述べられています 仮想テスト そして 稼働中のモニタリング。
このブログでは、検証、検証、認証、保証を次のように定義/説明します。
- 検証: システムが要件を満たしているかどうかを判断し、「システムは正しく構築されましたか?」という質問に答えるアクティビティです。
- 検証: システムがエンド ユーザーのニーズを満たしているかどうかを評価し、「適切なシステムを構築したか」という質問に答えます。 一方で、 モデルの検証 モデルがどれだけ現実を表現しているかを評価しています。
- 保証: システムが意図したとおりに機能するという正当な確信を示します。
- 認証: システムが一連の基準または標準に準拠しているかどうかを判断します。
自動運転車の場合、科学界は、経済的および技術的な観点から、走行距離ベースの適用範囲を使用した現実世界でのテストのみが実現不可能であることに早くから気づきました。
主な理由の 1 つは、実際のテスト中に安全関連のイベントがほとんど発生しないことです。 したがって、仮想テストが自動運転システムの認証において重要な役割を果たすことが明らかになりました。 仮想テストの結果は、シミュレーションが信頼できる場合にのみ、安全性の議論に貢献できます。これについては次のセクションで簡単に説明し、詳細については次のセクションで説明します。 NATM、 ガイドライン。
仮想テストとシミュレーションの信頼性評価
仮想テストの場合、1 つ以上の物理要素をシミュレーション モデルに置き換えます。
自動運転システム (ADS) の検証に使用される仮想テストは、全体的な検証戦略と基礎となるシミュレーション モデルの精度に応じて、さまざまな目的を達成できます。
目的としては次のようなものが挙げられます。
- システム全体の安全性に対する定性的または統計的な信頼性を提供します。
- 特定のサブシステム/コンポーネントのパフォーマンスに定性的または統計的な信頼性を提供します。
- 現実世界でテストするための困難なシナリオを発見します (現実世界のテストやトラック テストなど)。
あらゆる潜在的な利点とは対照的に、このアプローチの限界は、モデルの忠実度が本質的に限られていることです。 モデルは現実の大まかな表現しか提供できないため、ADS の安全性を検証するために現実世界を十分に置き換えるモデルの適合性を慎重に評価する必要があります。
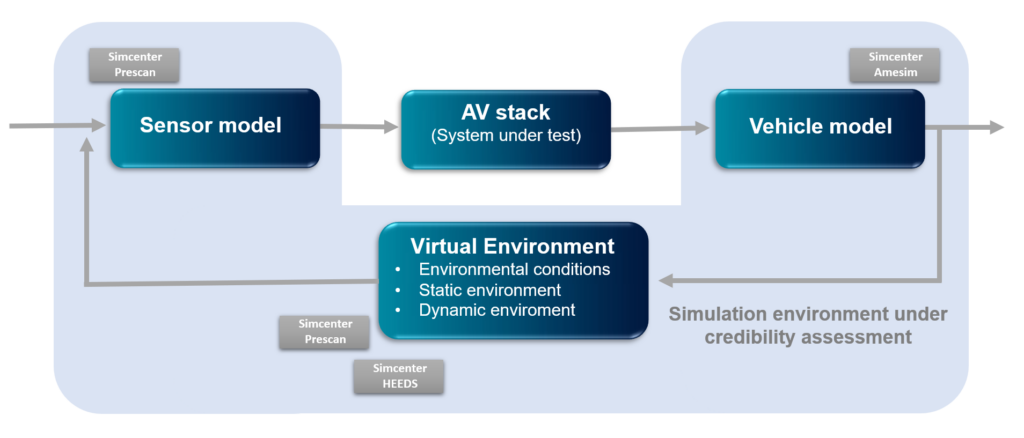
したがって、図 2 に示すシミュレーション モデルとシミュレーション環境の信頼性を評価して、現実世界のパフォーマンスと比較した結果の伝達可能性と信頼性を判断する必要があります。
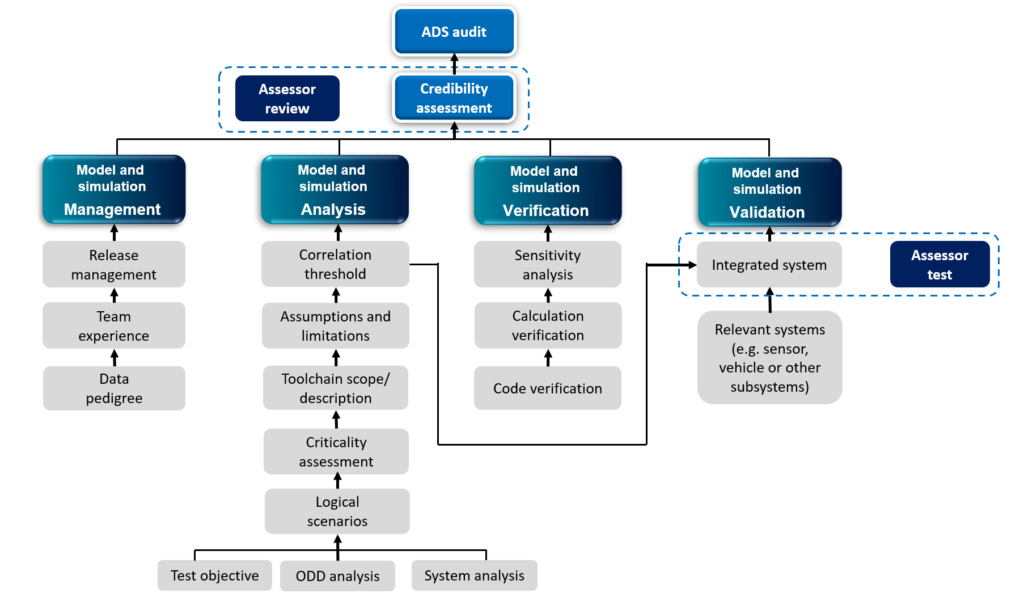
信頼性評価は、シミュレーション モデルとシミュレーション環境に加えて、モデルとシミュレーションの管理にも拡張されます。 これらすべての側面が図 3 に示されています。
シーメンスのホワイトペーパーを読む
自動運転車の開発ワークフローについて詳しくは、こちらをお読みください。 白書でさらに詳しく説明します。
- AV開発に関する課題
- 車両エンジニアリングのワークフロー
- 自動運転車のシナリオベースのテストとシナリオベースのテスト ワークフロー
- シミュレーションの信頼性評価ワークフロー
継続的な活動と関連規制
2022年10月より、 RDW (オランダ自動車局)、 JRC (欧州委員会の共同研究センター) とシーメンス インダストリー ソフトウェア オランダ BV は、特に新しい規制の解釈方法と適用方法、特に信頼性評価フレームワークの適用方法を理解するために緊密に協力しました。
理解を深めるために、特定のユースケース (自動バレーパーキング) が考慮され、シミュレーションの信頼性評価フレームワークの各ステップがこのユースケースに適用されています。
これらの調査の結果は信頼性評価ハンドブックにまとめられており、仮想テストを認証の柱として使用することに関心のある自動車 OEM がガイドラインとして使用できます。
最後に、興味のある読者のために、関連する規格の概要とリンクを以下の表に示します。
UN-ECE 規制:
| 規制番号 | 規制名 | 目的 |
| 1958 年の協定 | ECE/トランス/WP.29/2016/2 | 車輪付き車両、車輪付き車両に取り付けおよび/または使用できる機器および部品に関する調和のとれた国連技術規則の採用およびこれらの国連規則に基づいて付与された承認の相互承認の条件に関する協定 |
| R155 | E/ECE/TRANS/505/Rev.3/Add.154 | サイバーセキュリティに関する車両の認可およびサイバーセキュリティ管理体制に関する統一規定 |
| R156 | ECE/トランス/WP.29/2020/80 | ソフトウェア更新に関する車両の承認およびソフトウェア更新管理システムに関する統一規定 |
| R157 | ECE/トランス/WP.29/2020/81 | 自動車線維持システムに係る車両の認可に関する統一規定 |
| NATM | ECE/トランス/WP.29/2021/61 | 自動運転の新しい評価・試験手法(NATM) 自動運転システム検証のためのガイドライン(ADS) |
| ガイドライン | ECE/TRANS/WP.29-187-10/2022 | 自動運転システムの安全要件に関するガイドラインと推奨事項 |
EUの規制:
| 規制番号 | 規制名 | 目的 |
| 858 | 欧州議会および理事会の規則 (EU) 2018/858 | 自動車とそのトレーラー、およびそのような自動車用のシステム、コンポーネント、および個別の技術ユニットの型式承認と市場監視 |
| 2144 | 欧州議会および理事会の規則 (EU) 2019/2144 | 自動車とそのトレーラー、およびそのような自動車を対象としたシステム、コンポーネント、および個別の技術ユニットに対する、一般的な安全性と車両乗員および交通弱者の保護に関する型式承認要件 |
| 168 | 欧州議会および理事会の規則 (EU) No 168/2013 | 二輪車、三輪車および四輪車の承認および市場監視 |
| 1426 | 委員会実施規則 (EU) 2022/1426 | 完全自動運転車の自動運転システム(ADS)の型式承認のための統一手順と技術仕様に関する欧州議会および欧州理事会の規則(EU)2019/2144の適用規則を制定する |
EUプロジェクトへのシーメンスの関与
シーメンス、RDW、JRC が主導する自動運転車の安全性検証のための多柱アプローチに関する継続的な研究活動に加えて、シーメンスは次の EU プロジェクトに参加しています。
- フォセタ (FOのための基礎 C継続的な Eのエンジニアリング T錆びやすい あ自治)
データ駆動型とモデルベースのエンジニアリングの融合。 根底にある標的を絞った科学的ブレークスルー フォセタ モデル駆動型アプローチとデータ駆動型アプローチの融合にあります。 この収束は、検証と検証を段階的に適用し、完全な再検証と再検証の作業を回避する必要があるため、さらに複雑になります。 - アイテナ (EU 資金提供プロジェクト番号 101076754)。 アイテナ に関する研究とイノベーションのプロジェクトです。 C接続されていて、 C外科的 あ自動化された M信頼性があり、説明可能で説明責任のある CCAM テクノロジーを構築することを目的としたモビリティ (CCAM) ソリューション。
- アーバンスマートパーク (「」内の最初のプロジェクト)KICアーバンモビリティ」、EIT、欧州イノベーション&テクノロジー研究所が支援する欧州の取り組み)。 アーバンスマートパーク このプロジェクトは、広範囲の駐車関連サービスを提供する自動化された都市中心部の路上駐車場の開発に焦点を当てています。 これを読む ブログ もっと詳しく知るために。
- 日の出 (Horizon Research and Innovation Actions、プロジェクト番号 101069573 電話 HORIZON-CL5-2021-D6-01)。 の 日の出 このプロジェクトは、共通の安全保証フレームワークを確立し、サイロを相互接続し、調和のとれた方法で連携させることを目的としています。
- DITM (Dデジタル 私将来性のあるインフラストラクチャ M能力、NextGenerationEU が資金提供したプログラム)。 自動運転システムの支援を目指し、 DITM パートナーは、ローカリゼーション、交通サービス、デジタル マップ、充電インフラストラクチャ、継続的な安全性検証に関連する重要なコア テクノロジーを含む、デジタル インフラストラクチャのシステム アーキテクチャを開発しています。
プロジェクトの詳細については、Siemens Digital Industries Software のフェロー エンジニア兼コンサルタントである Alexandru Forrai ([email protected]) 博士までお問い合わせください。
デザイナーのためのフォーラムに参加しよう
あなたの専門知識はコミュニティにとって不可欠です。私たちに参加して、あなたの知識を提供してください。
今すぐフォーラムに参加する業界最高のプロフェッショナルと分かち合い、学び、成長する.