

デザイナーのためのフォーラムに参加しよう
あなたの専門知識はコミュニティにとって不可欠です。私たちに参加して、あなたの知識を提供してください。
今すぐフォーラムに参加する業界最高のプロフェッショナルと分かち合い、学び、成長する.
ロボットアームのアセンブリダイナミクスをシミュレーションし、そのパフォーマンスを最適化するANSYS Motionの威力をご覧ください。
ANSYS Motionとその機能の理解
ANSYS Motionは、ロボットアームなどの機械システムの挙動を解析・予測するためのロバストなシミュレーションソフトウェアです。ANSYS Motionを使用することで、エンジニアはロボットアームの動作とダイナミクスをシミュレーションし、さまざまな条件下でアームがどのように動き、どのように反応するかを総合的に理解することができます。
ANSYS Motionの主な強みは、関節、リンク、アクチュエータなど、ロボットアームのさまざまなコンポーネント間の複雑な相互作用を正確にモデリングし、シミュレーションできる点にあります。この機能により、エンジニアはアームの性能を評価し、潜在的な改善点や問題点を特定することができます。
さらに、ANSYS Motion には、さまざまな要因がロボットアームの性能に与える影響を調査するための幅広い解析ツールと機能が用意されています。これには、さまざまな制御戦略の効果の検証、アームの軌道の最適化、安定性と安全性の評価などが含まれます。
当社のロボットアームは、レール上に配置されたブロックに接続されたリニアアクチュエータを使用して、物体を楽に操作できるように意図的に設計されています。この革新的な設計により、アームはブロックの動きを組み合わせて物体をシームレスに操作することができます。本デモンストレーションでは、85kgの質量を運搬することで、その能力を実証します。
ANSYS Motionによるロボットアームモデルの設計と製作
ANSYS Motion でロボットアームのモデルを作成するには、段階的なプロセスが必要です。まず、アームの寸法、材料、機械部品など、アームに関する重要な情報を収集する必要があります。このデータは、ANSYS 3D Designツールを使用して正確な3Dモデルを作成するための基礎となります。
3Dモデルを作成した後、エンジニアはアームの運動学的構造を指定し、ジョイントや接続部の数や種類、各ジョイントの可動域を決定することができます。これにより、ANSYS Motionはアームの動作とダイナミクスを正確にシミュレートできます。
トリプトロンをシミュレートするために、1 つの固定ジョイントを使用してレールをしっかりと固定します。さらに、ロボットアームの動きを可能にする3つの並進ジョイントと、ベアリングを模倣してアームとシステム全体の接続を確立する6つの回転ジョイントがあります。このセットアップの視覚的な表現については、図1を参照してください。
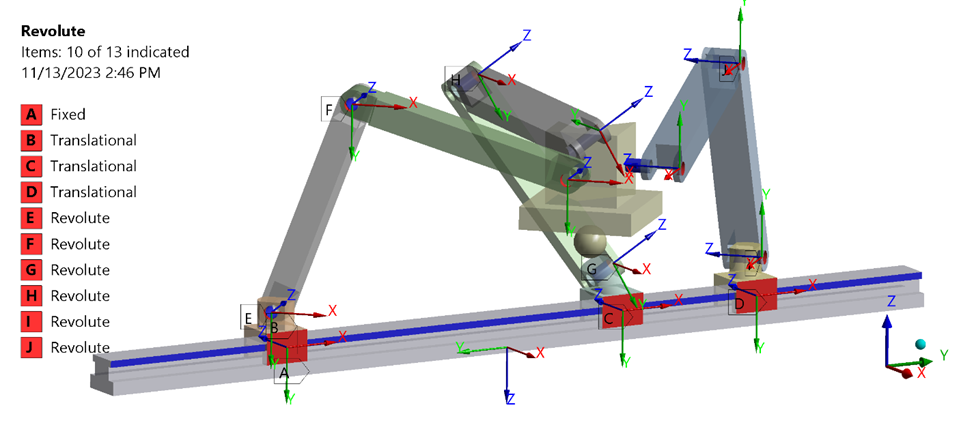
図1:ロボットシステムのジョイント定義
次に、モーターや油圧システムなどのアームのアクチュエーターと、それに対応する制御ストラテジーを定義する必要があります。これにより、ANSYS Motion でアームの動作と制御入力に対する応答をシミュレートできます。
図 2 に示すように、各ブロックの動きを定義する関数式があるため、直交空間で物体を制御することができます。
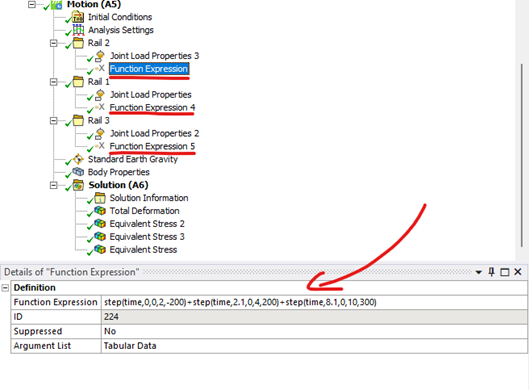
図2:関数式の定義
さらに、図3に示すように、モデルにはボディプロパティオブジェクトも含まれています。ANSYS Motionが提供するこの機能により、通常のソルバーと比較して高速なシミュレーションが可能になります。ボディの定義をノードボディからモーダルボディに変更することで、ソルバーはスコープされた特定のボディに対してモーダル解析を実行することができます。この効率的なマルチボディダイナミクス解析では、剛性情報を利用してボディの応力とひずみを正確に計算します。
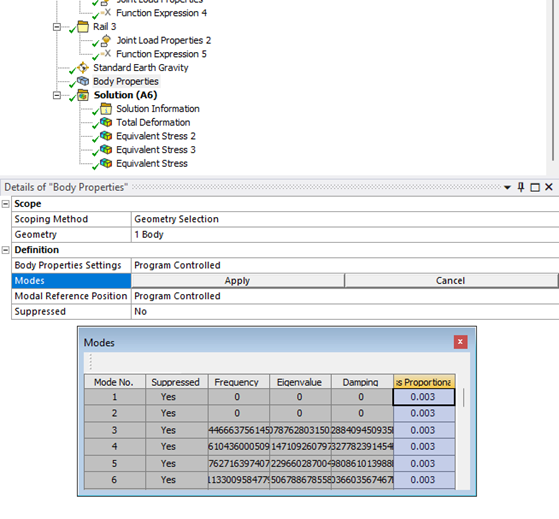
図3:ボディプロパティオブジェクトの定義
アームの運動学的構造とアクチュエータを定義したら、ANSYS Motion でシミュレーションを行い、アームの性能を徹底的に解析します。この解析では,さまざまな動作シナリオにおけ るアームの動き,力,トルク,その他の動的パラメー タを評価します.
応力、ひずみ、および変形の結果は、以下のアニメーション 1 に示すように時間領域でプロットすることができ、ロボットアームの性能を最適化することができます。
アニメーション1:時間領域での応力結果
図 4 に示すように、物体を操作するために 3 つのアクチュエータが加えるべき力を分析し、アクチュエータを選択するためにプロットすることができます。さらに、様々な動作、力、トルク、その他の動的パラメータを作成し、異なる動作条件下でプロットすることで、システムの有効性を高めることができます。
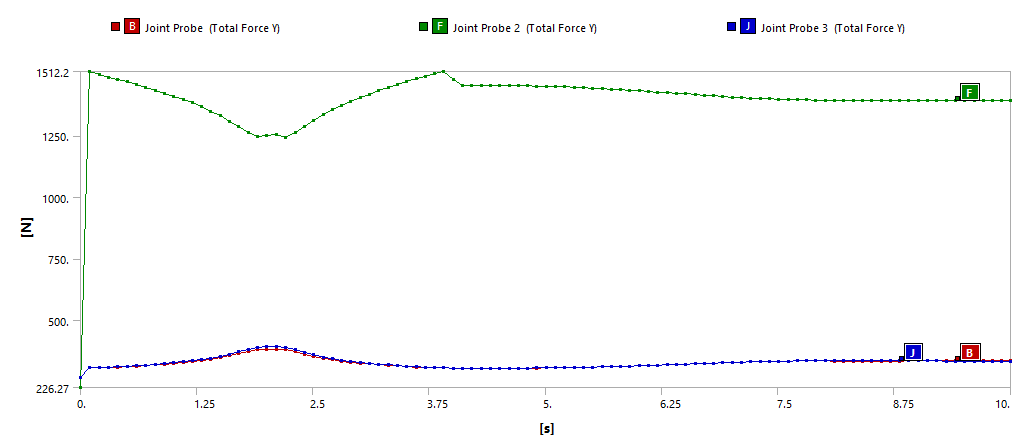
図4:並進ジョイントからの力反作用
シミュレーション結果に基づいて、エンジニアはアームの性能を向上させるために設計の修正や最適化を行うことができます。このようにシミュレーションと設計の改良を繰り返すことで、エンジニアは希望する性能基準を満たすロボットアームモデルを作成することができます。
ANSYS Motion でロボットアームモデルの設計と構築を行うには、機械工学の知識、シミュレーションの専門知識、アームの用途と性能要件の理解が必要です。
デザイナーのためのフォーラムに参加しよう
あなたの専門知識はコミュニティにとって不可欠です。私たちに参加して、あなたの知識を提供してください。
今すぐフォーラムに参加する業界最高のプロフェッショナルと分かち合い、学び、成長する.