

デザイナーのためのフォーラムに参加しよう
あなたの専門知識はコミュニティにとって不可欠です。私たちに参加して、あなたの知識を提供してください。
今すぐフォーラムに参加する業界最高のプロフェッショナルと分かち合い、学び、成長する.
適切な戦略を採用することで、より多くのビジネスを獲得し、より適切な意思決定を行い、物理的なプロトタイプの数を減らすことができます。
シーメンスに就職する前は、設計エンジニアとして数年間働き、さまざまな CAD および CAE ソフトウェアを利用してカスタマイズされた機械や自動化装置を開発していました。 これらのプロジェクトには 2 つの主要な障害がありました。 厳格な納期スケジュールと顧客が研究開発への資金提供に消極的であるため、結果的に適切に対応できるチャンスは 1 回だけです。 この仕事は楽しいものでしたが、ストレスの多いものでもありました。予期せぬ設計の変更により、すぐに利益が損なわれたり、場合によっては損失が発生したりする可能性がありました。 場合によっては、設計の変更により納期が遅れ、残念ながら一部のお客様にご満足いただけない場合がありました。
生涯学習に情熱を持ち、仲間と知識を共有することを楽しんでいる私は、Siemens NX と Simcenter ソフトウェアを使用して設計プロセスを加速する方法を説明するために次のストーリーを考案しました。
アニメーションは仕事の引用に役立ちます
弊社の営業担当者の一人が私に次のようなメッセージを送ってきました。
私は白紙の状態から、Siemens NX でいくつかのアイデアをスケッチし始めます。 グリッパーがペイロードの側面と平行に動くようにするために、2 本の平行バーを使用し、アクチュエーターによって駆動されるベル クランクを組み込みます。 絵が千の言葉を語るのと同じように、アニメーションはアイデアを効果的に伝えることができます。
以前は、機構アセンブリの動きをシミュレートするには、それぞれのアセンブリ関係とともに機構アセンブリの 3D モデルを作成する必要がありました。 ただし、次を使用してスケッチをアニメーション化できるようになりました。 NXアニメーションデザイナー、モデリングの前に概念を評価し、仮定の検討を実行する方がはるかに迅速かつ簡単です。 プロジェクトがまだ見積もり段階にあり、この時点ではあまり多くの時間を費やしたくないため、これは特に便利です。
複雑な動きを簡単に解決
アセンブリ拘束を手動で表現するというこの要求にどのようにアプローチしますか? このアプローチでは、目的のモーションを実現するために何度も反復することに多くの時間を費やすことになるでしょう。
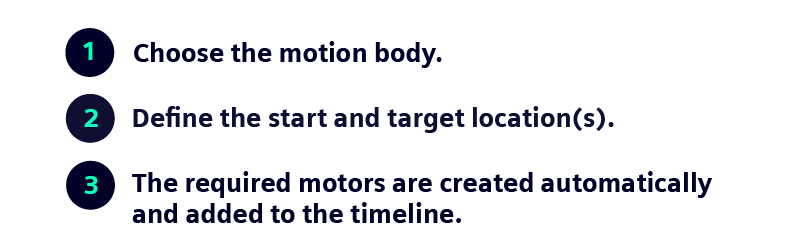
もっと良い方法があります。私のお気に入りのコマンドの 1 つは次のとおりです。 逆運動学。 使い方は信じられないほど簡単で、時間を大幅に節約できます。 ワークフローは次のとおりです。
この例では、ロボットの物理的制約を模倣するために適切なジョイントに制限を設定しましたが、ターゲットに到達できないという次のプロンプトが表示されました。
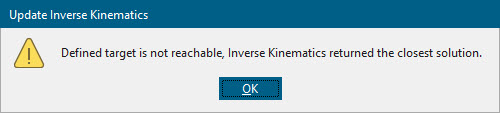
上のアニメーションで見られるように、ロボットは可動範囲が限られているためペイロードを掴むことができませんでした。簡単な解決策は、コンベアを持ち上げたり、ロボットから遠ざけるように移動したりすることです。 ただし、コンベアの高さは顧客の固定要件であるため、ペイロードを頭上から把握した場合はどうなるでしょうか? このアイデアを検証するには、ターゲット位置のトライアドの方向を変更することで簡単な編集を行い、モーションをほぼリアルタイムで再解決します。
この変更はうまくいくようですので、営業担当者に最新情報を伝えてみます。
変更リクエストを効率的に処理する
変更は常に発生しますが、Siemens NX の統合環境のおかげで、変更を簡単に効率的に処理できます。 お客様から新しい間取り図を頂きました。 彼らは私たちのピックアップ場所の近くにいくつかの機器を追加したため、私はそれをシミュレーションに含める必要がありました。 これを行うために、境界ボックスを使用して障害物を強調表示しました。 さらに、[インバース キネマティクス]コマンドの[衝突回避]オプションを有効にしました。 モーション パスを解決した後、シミュレーションは新たに追加された障害物を問題なく回避できました。
まとめ
Siemen NX を使用すると、設計者はコンセプト モデルを簡単にアニメーション化し、複雑な動きを検証し、変更要求を簡単に処理できるようになります。
デザイナーのためのフォーラムに参加しよう
あなたの専門知識はコミュニティにとって不可欠です。私たちに参加して、あなたの知識を提供してください。
今すぐフォーラムに参加する業界最高のプロフェッショナルと分かち合い、学び、成長する.