

디자이너를 위한 포럼에 참여하기
여러분의 전문 지식은 커뮤니티에 매우 중요합니다. 참여하여 지식을 공유하세요
지금 포럼에 참여하세요업계 최고의 전문가들과 함께 공유하고 배우며 성장하세요.
로봇 팔 어셈블리 동역학을 시뮬레이션하고 성능을 최적화하는 데 있어 ANSYS Motion의 강력한 기능을 알아보세요.
앤시스 모션과 그 기능에 대한 이해
앤시스 모션은 엔지니어가 로봇 팔을 포함한 기계 시스템의 동작을 분석하고 예측할 수 있도록 지원하는 강력한 시뮬레이션 소프트웨어입니다. 엔지니어는 ANSYS Motion을 사용하여 로봇 팔의 동작과 동역학을 시뮬레이션하여 다양한 조건에서 로봇 팔이 어떻게 움직이고 반응하는지에 대한 포괄적인 이해를 얻을 수 있습니다.
앤시스 모션의 핵심 강점은 조인트, 링크, 액추에이터 등 로봇 팔의 다양한 구성 요소 간의 복잡한 상호 작용을 정확하게 모델링하고 시뮬레이션할 수 있다는 점입니다. 이 기능을 통해 엔지니어는 로봇팔의 성능을 평가하고 개선할 수 있는 잠재적인 영역이나 문제를 파악할 수 있습니다.
또한 앤시스 모션은 엔지니어가 로봇 팔의 성능에 미치는 다양한 요인의 영향을 조사할 수 있는 광범위한 분석 도구와 기능을 제공합니다. 여기에는 다양한 제어 전략의 효과 조사, 로봇 팔의 궤적 최적화, 안정성 및 안전성 평가 등이 포함됩니다.
소니의 로봇 팔은 레일 위에 위치한 블록에 연결된 선형 액추에이터를 사용하여 물체를 손쉽게 조작할 수 있도록 의도적으로 설계되었습니다. 이 혁신적인 설계를 통해 팔은 블록의 움직임을 조합하여 물체를 원활하게 조작할 수 있습니다. 이 데모에서는 85kg의 중량물을 운반하여 로봇팔의 성능을 시연합니다.
앤시스 모션에서 로봇 팔 모델 설계 및 빌드하기
ANSYS Motion에서 로봇 팔 모델을 생성하려면 단계별 프로세스가 필요합니다. 먼저 엔지니어는 로봇팔의 치수, 재질, 기계 부품 등 로봇팔에 대한 필수 정보를 수집해야 합니다. 이 데이터는 ANSYS 3D 설계 도구를 사용하여 정확한 3D 모델을 개발하기 위한 기초가 됩니다.
3D 모델을 생성한 후 엔지니어는 팔의 운동 구조를 지정하여 관절과 연결부의 수량과 유형, 각 관절의 동작 범위를 결정할 수 있습니다. 이를 통해 앤시스 모션은 팔의 움직임과 역학을 정밀하게 시뮬레이션할 수 있습니다.
트립테론을 시뮬레이션하기 위해 하나의 고정 조인트를 사용하여 레일을 제자리에 단단히 고정합니다. 또한 로봇 팔이 움직일 수 있도록 하는 3개의 병진 조인트와 베어링을 모방하여 팔과 전체 시스템을 연결하는 6개의 회전 조인트가 있습니다. 이 설정을 시각적으로 표현한 그림 1을 참조하세요.
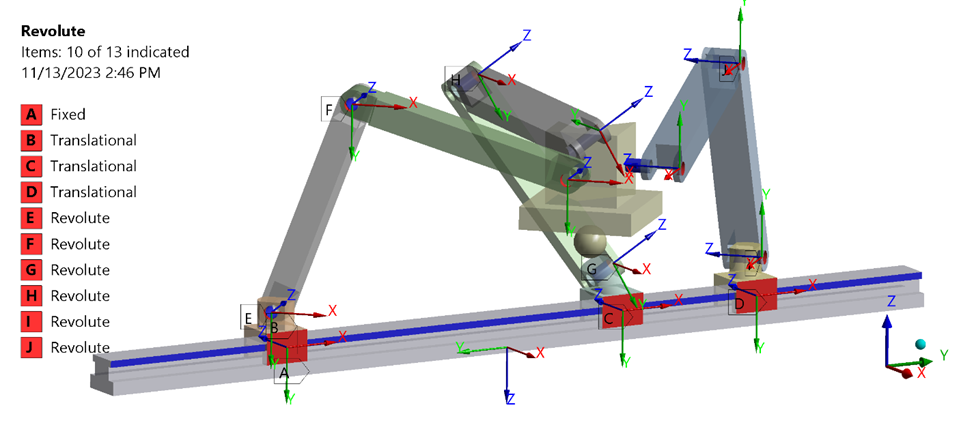
그림 1: 로봇 시스템의 조인트 정의
다음으로 엔지니어는 모터 또는 유압 시스템과 같은 팔의 액추에이터와 해당 제어 전략을 정의해야 합니다. 이를 통해 앤시스 모션은 로봇팔의 작동과 제어 입력에 대한 반응을 시뮬레이션할 수 있습니다.
그림 2와 같이 직교 공간에서 물체를 제어할 수 있도록 각 블록의 움직임을 정의하는 함수 표현식이 있습니다.
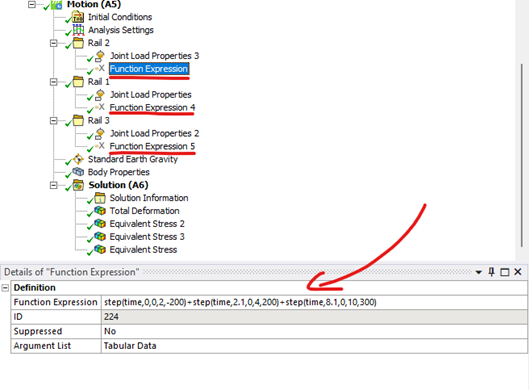
그림 2: 함수 표현식 정의
또한 이 모델에는 그림 3과 같이 바디 프로퍼티 객체도 포함되어 있습니다. 앤시스 모션에서 제공하는 이 기능을 사용하면 일반 솔버에 비해 더 빠른 시뮬레이션이 가능합니다. 솔버는 바디의 정의를 노드 바디에서 모달 바디로 변경함으로써 범위가 지정된 특정 바디에 대해 모달 해석을 수행할 수 있습니다. 이 효율적인 다물체 동역학 분석은 강성 정보를 활용하여 몸체에 대한 응력과 변형을 정확하게 계산합니다.
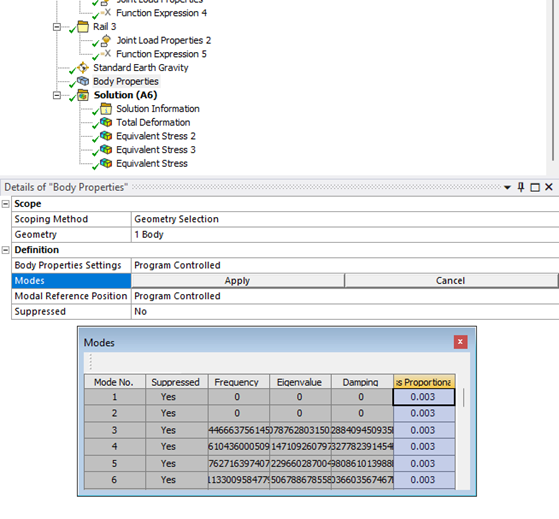
그림 3: 바디 프로퍼티 오브젝트 정의
로봇팔의 운동 구조와 액추에이터가 정의되면 엔지니어는 앤시스 모션에서 시뮬레이션을 수행하여 로봇팔의 성능을 철저하게 분석할 수 있습니다. 이 분석에는 다양한 작동 시나리오에서 동작, 힘, 토크 및 기타 동적 파라미터에 대한 평가가 포함됩니다.
아래 애니메이션 1에서 볼 수 있듯이 응력, 변형 및 변형 결과를 시간 영역에 플롯하여 로봇 팔의 성능을 최적화할 수 있습니다.
애니메이션 1: 시간 도메인의 응력 결과
그림 4와 같이 물체를 조작하기 위해 세 개의 액추에이터가 적용해야 하는 힘을 분석하고 플롯하여 액추에이터를 선택할 수 있습니다. 또한 다양한 동작, 힘, 토크 및 기타 동적 파라미터를 생성하고 다양한 작동 조건에서 플롯하여 시스템의 효율성을 높일 수 있습니다.
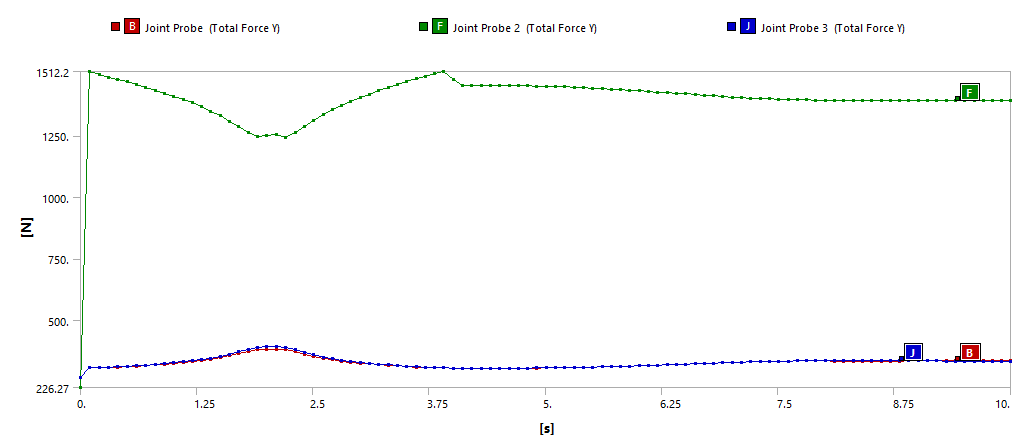
그림 4: 병진 조인트의 힘 반응
엔지니어는 시뮬레이션 결과를 바탕으로 로봇팔의 성능을 개선하기 위해 설계를 수정하거나 최적화할 수 있습니다. 이러한 반복적인 시뮬레이션 및 설계 개선 프로세스를 통해 엔지니어는 원하는 성능 기준을 충족하는 로봇 팔 모델을 만들 수 있습니다.
전반적으로 ANSYS Motion에서 로봇 팔 모델을 설계하고 제작하려면 기계 공학 지식, 시뮬레이션 전문 지식, 로봇 팔의 의도된 애플리케이션 및 성능 요구 사항에 대한 이해가 필요합니다.
디자이너를 위한 포럼에 참여하기
여러분의 전문 지식은 커뮤니티에 매우 중요합니다. 참여하여 지식을 공유하세요
지금 포럼에 참여하세요업계 최고의 전문가들과 함께 공유하고 배우며 성장하세요.