

디자이너를 위한 포럼에 참여하기
여러분의 전문 지식은 커뮤니티에 매우 중요합니다. 참여하여 지식을 공유하세요
지금 포럼에 참여하세요업계 최고의 전문가들과 함께 공유하고 배우며 성장하세요.
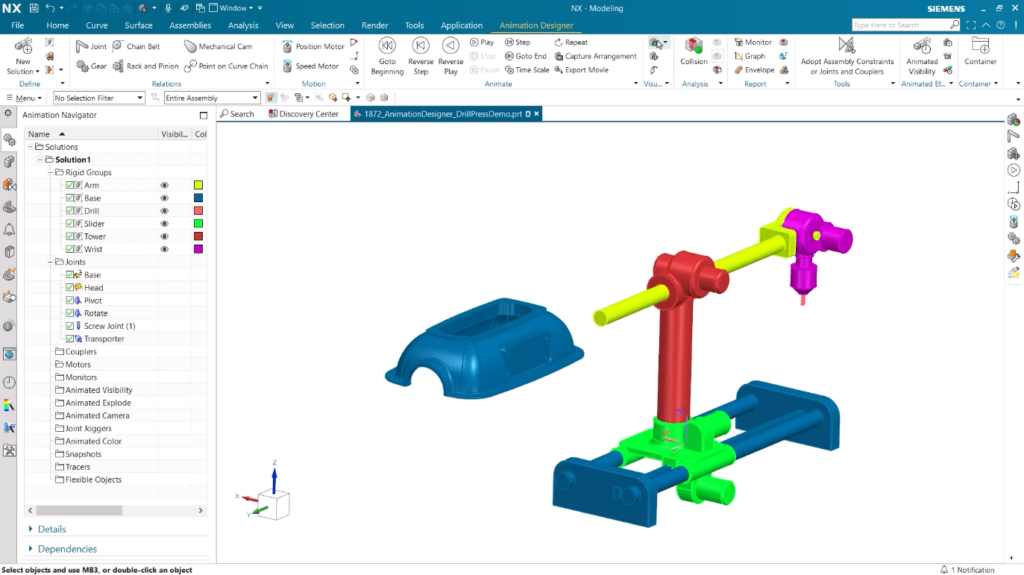
어셈블리 내의 강체 그룹과 조인트 보기 및 할당
역기구학(Inverse Kinematics)은 고정 그룹이 설정 지점에서 원하는 지점으로 이동하는 모션 경로를 자동으로 생성하므로 부드럽고 매끄러운 애니메이션을 쉽게 만들 수 있습니다. 애니메이션 내비게이터를 사용하면 다양한 강성 그룹을 쉽게 볼 수 있을 뿐만 아니라 할당된 색상을 기준으로 어떤 바디가 함께 그룹화되고 어떤 바디가 분리되는지 볼 수 있습니다. 여기에서 그래픽 디스플레이의 조인트를 검사하여 어셈블리에서 위치가 어떻게 지정되는지 확인할 수도 있습니다. 그런 다음 이러한 각 조인트는 역기구학 도구를 사용할 때 드릴 프레스의 동작을 제한하는 데 사용됩니다.
역운동학을 사용하여 두 대상 지점에 대한 모션 경로 만들기
강성 그룹과 관절을 설정한 후에는 역운동학 명령을 사용하여 모션 경로를 만들 수 있습니다. 비디오 예에서 강체 그룹은 드릴 프레스 스핀들이 될 것이며 대상은 드릴링 중인 부품에 있는 구멍의 중심점이 될 것입니다.
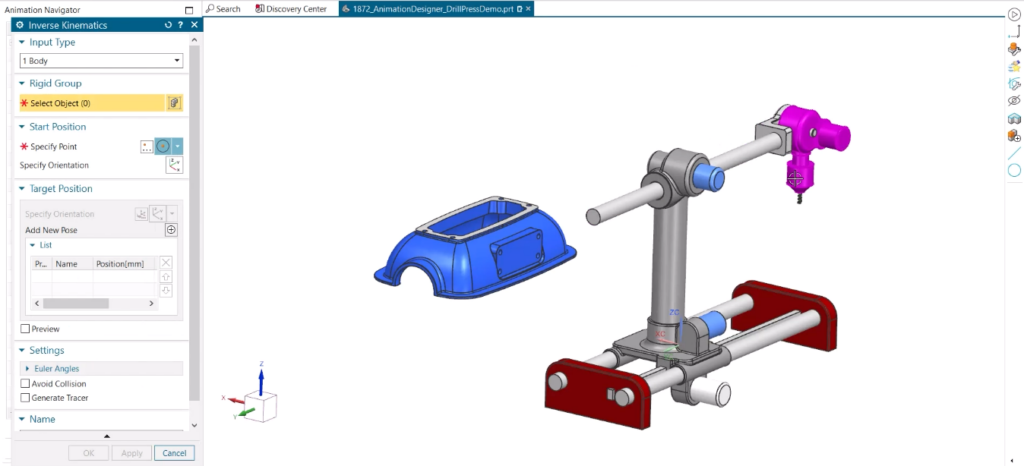
시작점과 목적지점의 좌표계는 정렬되어야 하며, 이 방향을 달성하는 쉬운 방법은 참조용으로 원하는 면과 함께 축을 선택하는 것입니다. 드릴 프레스 스핀들의 경우 드릴 비트를 수용하기 위해 대상 지점을 뒤로 이동해야 합니다. 이는 또한 첫 번째 대상 지점에 도달한 후 두 번째 스핀들 대상 지점을 지정하여 부품을 관통하는 드릴 비트를 시뮬레이션함으로써 쉽게 달성됩니다.
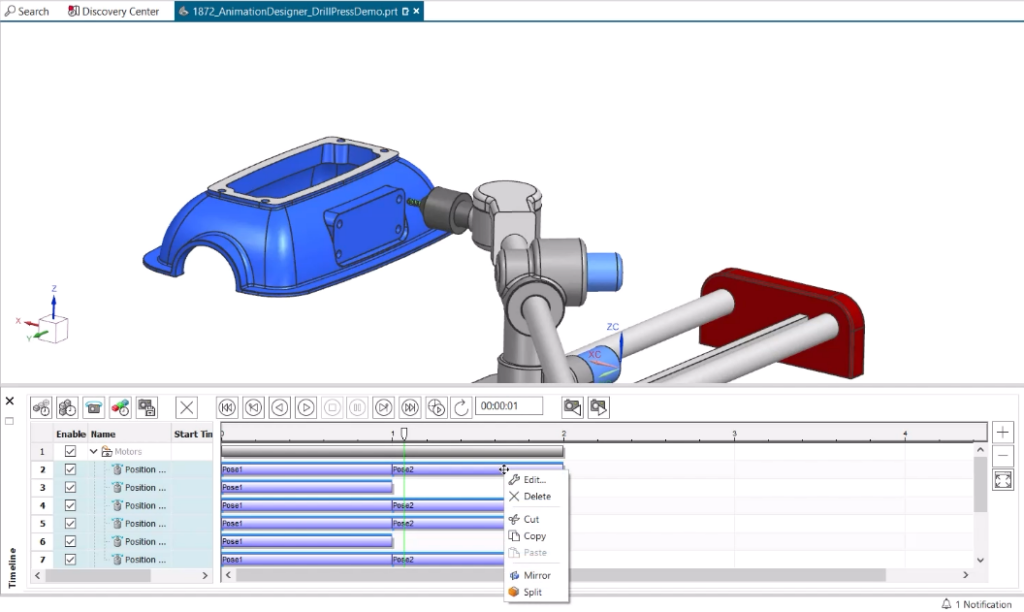
이제 생성된 모션 경로를 볼 수 있습니다! 드릴 프레스의 애니메이션을 통해 각 강성 그룹이 어셈블리 내에서 어떻게 움직이는지 더 잘 이해할 수 있으며 애니메이션을 통해 이동하는 타임라인을 열어 이 동작을 더 자세히 검사할 수 있습니다.
모션을 미러링하여 애니메이션 시퀀스 완성
이제 모션 경로 애니메이션이 생성되었으므로 수행해야 할 마지막 단계는 드릴 프레스를 원래 위치로 완전히 되돌리는 것입니다. 이렇게 하려면 타임라인에 이미 생성된 모션을 모두 선택한 다음 '미러링' 옵션을 선택하면 됩니다. 이제 최종 애니메이션은 드릴 프레스의 전체 순서를 처음부터 끝까지 보여줍니다.
디자이너를 위한 포럼에 참여하기
여러분의 전문 지식은 커뮤니티에 매우 중요합니다. 참여하여 지식을 공유하세요
지금 포럼에 참여하세요업계 최고의 전문가들과 함께 공유하고 배우며 성장하세요.