

Join the forum for Designers!
Your expertise is vital to the community. Join us and contribute your knowledge!
Join the Forum NowShare, learn and grow with the best professionals in the industry.
Ontdek de kracht van ANSYS Motion bij het simuleren van de dynamiek van de robotarmassemblage en het optimaliseren van de prestaties ervan.
ANSYS Motion en de mogelijkheden ervan begrijpen
ANSYS Motion is robuuste simulatiesoftware waarmee ingenieurs het gedrag van mechanische systemen, inclusief robotarmen, kunnen analyseren en voorspellen. Door gebruik te maken van ANSYS Motion kunnen ingenieurs de beweging en dynamiek van robotarmen simuleren, waardoor ze een uitgebreid inzicht krijgen in hoe de arm beweegt en reageert in verschillende omstandigheden.
Een belangrijke kracht van ANSYS Motion ligt in de nauwkeurige modellering en simulatie van de ingewikkelde interacties tussen verschillende componenten van een robotarm, zoals gewrichten, koppelingen en actuatoren. Dankzij deze mogelijkheid kunnen ingenieurs de prestaties van de arm beoordelen en eventuele verbeterpunten of problemen identificeren.
Bovendien biedt ANSYS Motion een breed scala aan analysetools en functies waarmee ingenieurs de impact van verschillende factoren op de prestaties van een robotarm kunnen onderzoeken. Dit omvat het onderzoeken van de effecten van verschillende controlestrategieën, het optimaliseren van het traject van de arm en het evalueren van de stabiliteit en veiligheid ervan.
Onze robotarmen zijn doelbewust ontworpen om objecten moeiteloos te manipuleren met behulp van lineaire actuatoren die zijn verbonden met blokken die op rails zijn geplaatst. Dit innovatieve ontwerp zorgt ervoor dat de armen objecten naadloos kunnen manipuleren door een combinatie van blokbewegingen. In deze demonstratie zal de arm zijn capaciteiten demonstreren door een massa van 85 kg te dragen.
Ontwerpen en bouwen van een robotarmmodel in ANSYS Motion
Het maken van een robotarmmodel in ANSYS Motion vereist een stapsgewijs proces. Ten eerste moeten ingenieurs essentiële informatie over de arm verzamelen, zoals de afmetingen, materialen en mechanische componenten. Deze gegevens dienen als basis voor het ontwikkelen van een nauwkeurig 3D-model met behulp van ANSYS 3D Design-tools.
Na het maken van het 3D-model hebben ingenieurs de mogelijkheid om de kinematische structuur van de arm te specificeren, waarbij ze het aantal en het type gewrichten en verbindingen bepalen, evenals het bewegingsbereik voor elk gewricht. Hierdoor kan ANSYS Motion de beweging en dynamiek van de arm nauwkeurig simuleren.
Om de tripteron te simuleren, gebruiken we één vast gewricht om de rail veilig op zijn plaats te houden. Daarnaast zijn er drie translatiegewrichten die ervoor zorgen dat de robotarm kan bewegen, evenals zes draaibare gewrichten die verbindingen tot stand brengen tussen de armen en het hele systeem, waardoor lagers worden nagebootst. Raadpleeg Figuur 1 voor een visuele weergave van deze opstelling.
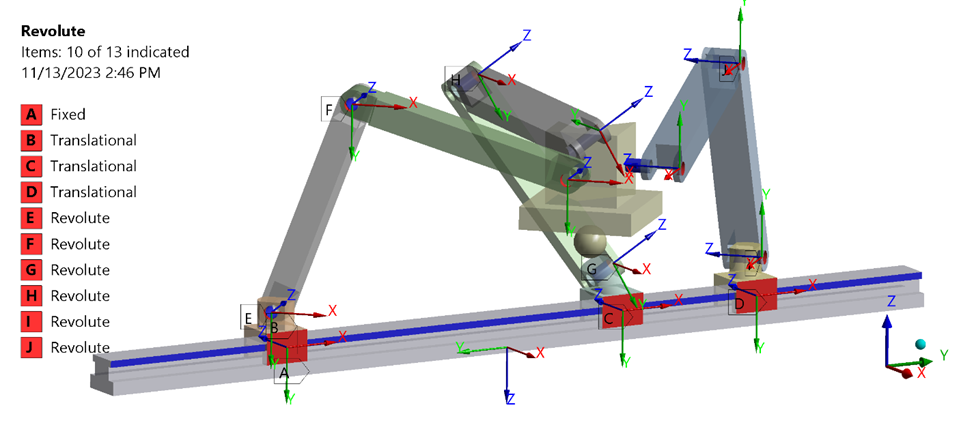
Figuur 1: Gezamenlijke definities van het robotsysteem
Vervolgens moeten ingenieurs de actuatoren van de arm, zoals motoren of hydraulische systemen, en hun bijbehorende besturingsstrategieën definiëren. Hierdoor kan ANSYS Motion de bediening van de arm en de reactie op stuurinvoer simuleren.
Zoals weergegeven in figuur 2 hebben we functie-uitdrukkingen die bewegingen van elk blok definiëren, zodat we het object in de cartesische ruimte kunnen besturen.
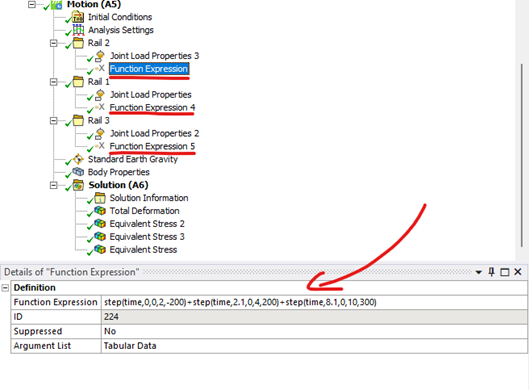
Figuur 2: Definitie van functie-expressie
Bovendien bevat het model ook een body-eigenschapsobject, zoals weergegeven in figuur 3. Deze functie van ANSYS Motion maakt snellere simulaties mogelijk vergeleken met reguliere oplossers. Door de definitie van het lichaam te veranderen van knooppuntlichaam naar modaal lichaam, kan de oplosser modale analyses uitvoeren voor de specifieke lichamen waarop het betrekking heeft. Deze efficiënte analyse van de dynamiek van meerdere lichamen maakt gebruik van stijfheidsinformatie om de spanningen en spanningen op de lichamen nauwkeurig te berekenen.
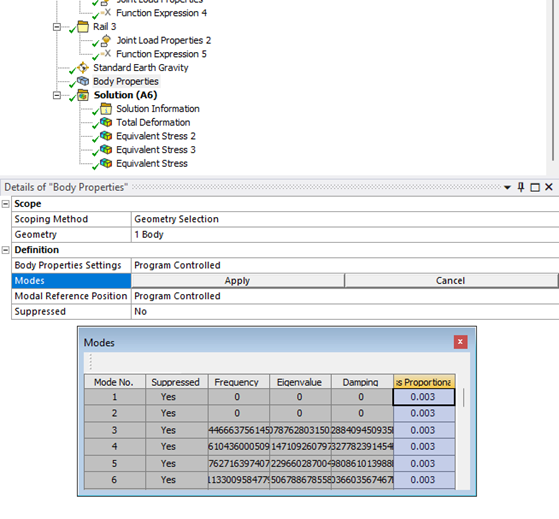
Figuur 3: Definitie van lichaamseigenschapobject
Zodra de kinematische structuur en actuatoren van de arm zijn gedefinieerd, kunnen ingenieurs simulaties uitvoeren in ANSYS Motion om de prestaties van de arm grondig te analyseren. Deze analyse omvat de beoordeling van de beweging, krachten, koppels en andere dynamische parameters in verschillende operationele scenario's.
De resultaten van spanning, rek en vervorming kunnen in het tijdsdomein worden uitgezet, zoals gedemonstreerd in animatie 1 hieronder, om de prestaties van de robotarmen te optimaliseren.
Animatie 1: Stressresultaat in tijdsdomein
De krachten die de drie actuatoren moeten uitoefenen om het object te manipuleren, kunnen worden geanalyseerd en uitgezet voor de gekozen actuatoren, zoals weergegeven in figuur 4. Bovendien kunnen verschillende bewegingen, krachten, koppels en andere dynamische parameters worden gecreëerd en uitgezet onder verschillende bedrijfsomstandigheden. om de effectiviteit van het systeem te vergroten.
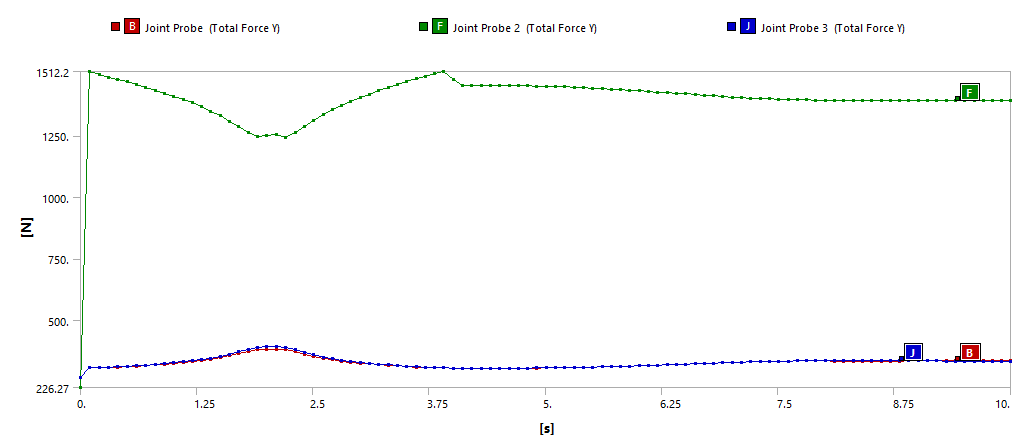
Figuur 4: De krachtreactie van translationele gewrichten
Op basis van de simulatieresultaten kunnen ingenieurs vervolgens ontwerpwijzigingen of optimalisaties doorvoeren om de prestaties van de arm te verbeteren. Dit iteratieve proces van simulatie en ontwerpverfijning helpt ingenieurs een robotarmmodel te creëren dat aan de gewenste prestatiecriteria voldoet.
Over het geheel genomen vereist het ontwerpen en bouwen van een robotarmmodel in ANSYS Motion een combinatie van kennis van werktuigbouwkunde, simulatie-expertise en inzicht in de beoogde toepassing en prestatie-eisen van de arm.
Join the forum for Designers!
Your expertise is vital to the community. Join us and contribute your knowledge!
Join the Forum NowShare, learn and grow with the best professionals in the industry.