

Join the forum for Designers!
Your expertise is vital to the community. Join us and contribute your knowledge!
Join the Forum NowShare, learn and grow with the best professionals in the industry.
De toekomst van transport belooft het leven voor iedereen veiliger en mobieler te maken, met positieve economische resultaten. Om die belofte waar te maken, is het echter noodzakelijk om nieuwe voertuigen en elk subsysteem van hun architectuur te testen, vooral omdat de subsystemen slimmer en zeer complex worden.
De toegenomen complexiteit vereist een radicale verandering van testmethoden en nieuwe concepten voor uitgebreide voertuigverificatie en -validatie in zowel de fysieke als de virtuele wereld, die in nieuwe regelgeving is vastgelegd.
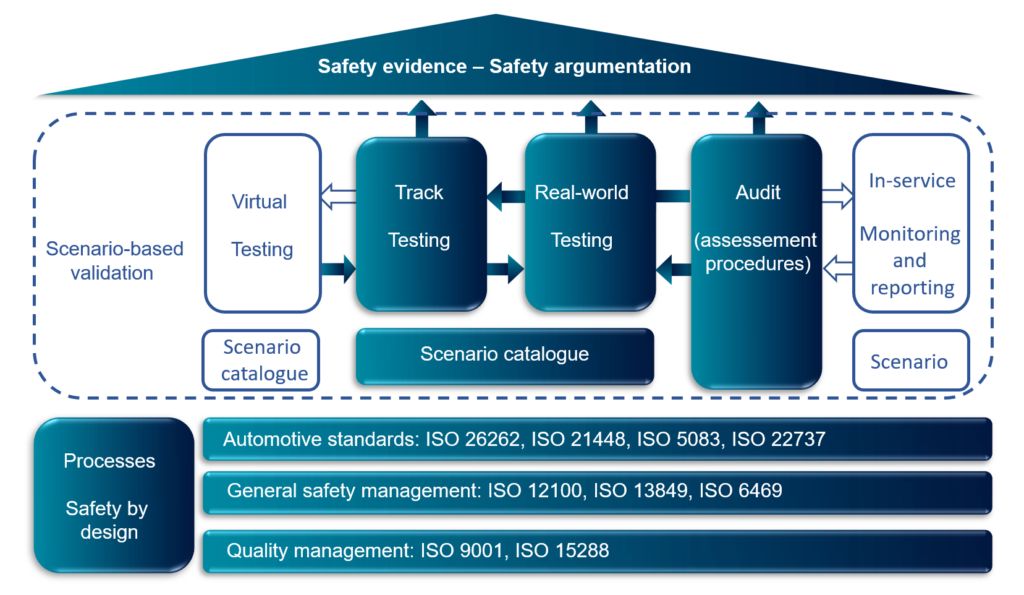
In deze zin presenteerde de UNECE (Economische Commissie voor Europa van de Verenigde Naties) in februari 2021 de Nieuwe Assessment/Testmethode voor Geautomatiseerd Rijden (NATM) – een kader dat een meerpijlerbenadering introduceert voor de veiligheidsvalidatie van geautomatiseerd rijden (zie Fig. 1). NATM, Richtlijnen.
Bovendien heeft de EU-Commissie in augustus 2022 Verordening 2022/1426 tot vaststelling van toepassingsbepalingen voor Verordening (EU) 2019/2144 van het Europees Parlement en de Raad met betrekking tot uniforme procedures en technische specificaties voor de typegoedkeuring van het geautomatiseerde aandrijfsysteem (ADS) van volautomatische voertuigen aangenomen. 2144, 1426.
Wat is de meerpijlerveiligheidsvalidatie van AV?
De meerpijlerveiligheidsvalidatie van geautomatiseerde voertuigen specificeert 5 certificeringspijlers, die de veiligheidsargumentatie ondersteunen. Naast de drie bekende pijlers (spoortests, testen in de praktijk en controle), vermeldt de verordening virtueel testen en monitoring tijdens gebruik.
In deze blog worden de verificatie, validatie, certificatie en zekerheid als volgt gedefinieerd/beschreven:
- Verificatie: is een activiteit die bepaalt of een systeem aan de vereisten voldoet, waarbij de vraag wordt beantwoord: “Hebben we het systeem goed gebouwd?”
- Validatie: is het beoordelen of het systeem voldoet aan de behoeften van de eindgebruiker, waarbij de vraag wordt beantwoord: “Hebben we het juiste systeem gebouwd? Anderzijds, modelvalidatie is het evalueren hoe goed het model de werkelijkheid weergeeft.
- Zekerheid: is gerechtvaardigd vertrouwen dat het systeem functioneert zoals bedoeld.
- Certificering: bepaalt of een systeem voldoet aan een set criteria of normen.
In het geval van autonome voertuigen realiseerde de wetenschappelijke gemeenschap zich al vroeg dat alleen testen in de echte wereld – met behulp van op kilometers gebaseerde dekking – niet haalbaar is, vanuit economisch en technisch oogpunt.
Een van de belangrijkste redenen hiervoor is dat tijdens tests in de echte wereld zeer zelden veiligheidsrelevante gebeurtenissen plaatsvinden. Daarom werd het duidelijk dat virtueel testen een sleutelrol zal spelen bij de certificering van geautomatiseerde rijsystemen. De resultaten van virtuele testen kunnen bijdragen aan de veiligheidsargumentatie als en alleen als de simulaties geloofwaardig zijn. NATM, Richtlijnen.
Virtueel testen en simulatie geloofwaardigheidsbeoordeling
Bij virtueel testen vervangen we een of meer fysieke elementen door een simulatiemodel.
Virtuele tests die gebruikt worden voor de validatie van automatische besturingssystemen (ADS) kunnen verschillende doelstellingen bereiken, afhankelijk van de algemene validatiestrategie en de nauwkeurigheid van de onderliggende simulatiemodellen.
Enkele van de doelstellingen kunnen zijn:
- Kwalitatief of statistisch vertrouwen geven in de veiligheid van het volledige systeem.
- Kwalitatief of statistisch vertrouwen bieden in de prestaties van specifieke subsystemen/componenten.
- Uitdagende scenario’s ontdekken om in de echte wereld te testen (bijv. praktijktests en circuittests).
Tegenover alle potentiële voordelen staat een beperking van deze aanpak, namelijk de intrinsieke beperkte getrouwheid van de modellen. Aangezien modellen slechts een grove weergave van de werkelijkheid kunnen bieden, moet de geschiktheid van een model om de echte wereld op bevredigende wijze te vervangen voor het valideren van de veiligheid van ADS’en zorgvuldig worden beoordeeld.
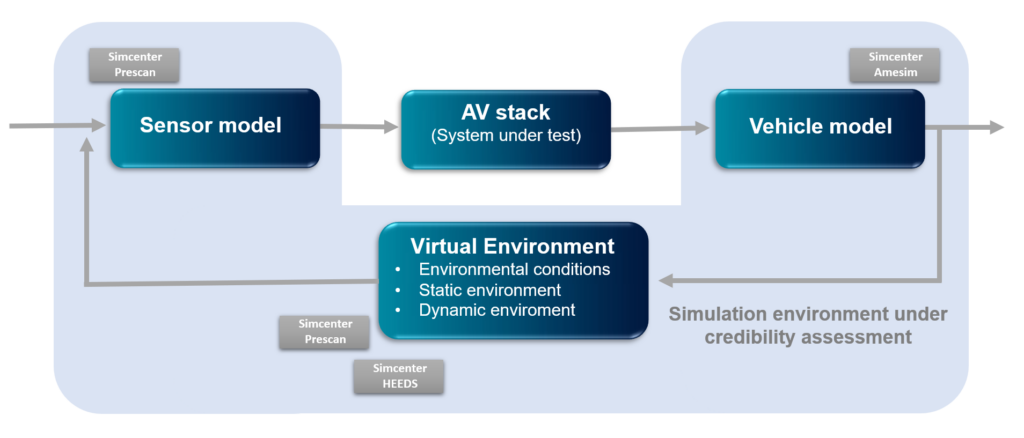
Daarom moet de geloofwaardigheid van de simulatiemodellen en simulatieomgeving in Fig. 2 worden beoordeeld om de overdraagbaarheid en betrouwbaarheid van de resultaten in vergelijking met de prestaties in de echte wereld te bepalen.
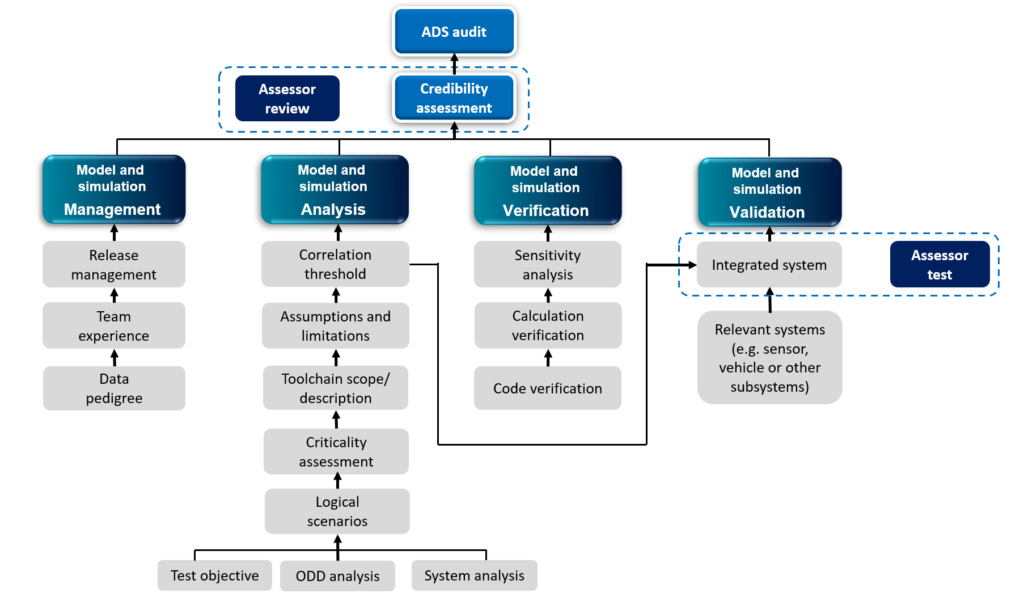
Naast simulatiemodellen en simulatieomgeving wordt de beoordeling van de geloofwaardigheid ook uitgebreid naar het model- en simulatiebeheer. Al deze aspecten worden weergegeven in Fig. 3.
Lees de whitepaper van Siemens
Lees dit voor meer informatie over de ontwikkelingsworkflows van het autonome voertuig whitepaperwaarin meer details worden beschreven:
- De uitdagingen van AV-ontwikkeling
- de workflow van voertuigtechniek
- Het scenariogebaseerd testen van autonome voertuigen en scenariogebaseerde testworkflows
- De simulatie geloofwaardigheidsbeoordeling workflow
Lopende activiteiten en relevante regelgeving
Vanaf oktober 2022, RDW (de Nederlandse Voertuigautoriteit), GCO (Joint Research Center van de Europese Commissie) en Siemens Industry Software Netherlands B.V., hebben nauw samengewerkt om te begrijpen hoe de nieuwe verordening geïnterpreteerd en toegepast moet worden, met name hoe het raamwerk voor geloofwaardigheidsbeoordeling toegepast moet worden.
Voor een beter begrip is een specifieke use-case (geautomatiseerd valet-parkeren) beschouwd en is elke stap van het raamwerk voor geloofwaardigheidsbeoordeling van simulatie op deze use-case toegepast.
Het resultaat van deze onderzoeken is samengevat in een handboek voor geloofwaardigheidsbeoordeling, dat als richtlijn kan worden gebruikt door OEM’s in de auto-industrie die geïnteresseerd zijn in het gebruik van virtueel testen als certificeringspijler.
Tot slot vindt de geïnteresseerde lezer in de onderstaande tabellen een samenvatting van de relevante normen en links.
VN-ECE-reglement:
| Reglementnummer | Naam verordening | Doel |
| Overeenkomst van 1958 | ECE/TRANS/WP.29/2016/2 | Overeenkomst betreffende het aannemen van geharmoniseerde technische reglementen van de Verenigde Naties voor wielvoertuigen, uitrustingsstukken en onderdelen die kunnen worden aangebracht en/of gebruikt op wielvoertuigen en de voorwaarden voor wederzijdse erkenning van goedkeuringen verleend op basis van deze reglementen van de Verenigde Naties |
| R155 | E/ECE/TRANS/505/Rev.3/Add.154 | Uniforme voorschriften voor de goedkeuring van voertuigen wat de cyberveiligheid en het cyberveiligheidsbeheersysteem betreft |
| R156 | ECE/TRANS/WP.29/2020/80 | Uniforme voorschriften voor de goedkeuring van voertuigen wat software-updates en het beheersysteem voor software-updates betreft |
| R157 | ECE/TRANS/WP.29/2020/81 | Uniforme bepalingen voor de goedkeuring van voertuigen met betrekking tot automatische rijstrookbegeleidingssystemen |
| NATM | ECE/TRANS/WP.29/2021/61 | Nieuwe beoordelings-/testmethode voor geautomatiseerd rijden (NATM) Richtsnoeren voor het valideren van systemen voor geautomatiseerd rijden (ADS) |
| Richtlijnen | ECE/TRANS/WP.29-187-10/2022 | Richtsnoeren en aanbevelingen inzake veiligheidseisen voor geautomatiseerde aandrijfsystemen |
EU-verordening:
| Regelnummer | Naam verordening | Doel |
| 858 | VERORDENING (EU) 2018/858 VAN HET EUROPEES PARLEMENT EN DE RAAD | Typegoedkeuring van en markttoezicht op motorvoertuigen en aanhangwagens daarvan en van systemen, onderdelen en technische eenheden die voor dergelijke voertuigen zijn bestemd |
| 2144 | VERORDENING (EU) 2019/2144 VAN HET EUROPEES PARLEMENT EN DE RAAD | Typegoedkeuringsvoorschriften voor motorvoertuigen en aanhangwagens daarvan en voor systemen, onderdelen en technische eenheden die voor dergelijke voertuigen zijn bestemd, wat hun algemene veiligheid en de bescherming van de inzittenden en kwetsbare weggebruikers betreft |
| 168 | VERORDENING (EU) Nr. 168/2013 VAN HET EUROPEES PARLEMENT EN DE RAAD | Goedkeuring van en markttoezicht op twee- of driewielige voertuigen en vierwielers |
| 1426 | UITVOERINGSVERORDENING (EU) 2022/1426 VAN DE COMMISSIE | tot vaststelling van regels voor de toepassing van Verordening (EU) 2019/2144 van het Europees Parlement en de Raad met betrekking tot uniforme procedures en technische specificaties voor de typegoedkeuring van het geautomatiseerde aandrijfsysteem (ADS) van volautomatische voertuigen |
Siemens betrokkenheid bij EU-projecten
Naast de lopende onderzoeksactiviteiten onder leiding van Siemens, RDW en JRC over de meerpijlerbenadering voor veiligheidsvalidatie van geautomatiseerde voertuigen, is Siemens betrokken bij de volgende EU-projecten:
- FOCETA (FOundaties voor Continue Engineering van Trustworthy Autonomie)
Convergentie van datagestuurde en modelgebaseerde engineering. De onderliggende gerichte wetenschappelijke doorbraak van FOCETA ligt in de convergentie van modelgestuurde en gegevensgestuurde benaderingen. Deze convergentie wordt verder bemoeilijkt door de noodzaak om verificatie en validatie stapsgewijs toe te passen en volledige inspanningen voor herverificatie en hervalidatie te vermijden. - AIthena (Door de EU gefinancierd projectnummer 101076754). AIthena is een onderzoeks- en innovatieproject over Connected en Cooperatief Automated Mobility (CCAM)-oplossingen die gericht zijn op het ontwikkelen van betrouwbare, verklaarbare en controleerbare CCAM-technologieën.
- UrbanSmartPark (eerste project binnen “KIC Stedelijke Mobiliteit“, een Europees initiatief gesteund door het EIT, het Europees Instituut voor Innovatie & Technologie). UrbanSmartPark project richt zich op de ontwikkeling van geautomatiseerd parkeren op straat in binnensteden met een breed scala aan mogelijke parkeergerelateerde diensten. Lees dit blog voor meer informatie.
- ZONNEN (Horizon Research and Innovation Actions, Project No. 101069573 Call HORIZON-CL5-2021-D6-01). De SUNRISE Het doel van dit project is om een gemeenschappelijk kader voor veiligheidsborging op te zetten, door silo’s met elkaar te verbinden en ze op een geharmoniseerde manier te laten samenwerken.
- DITM (Digitaal Infrastructuur voor toekomstbestendigheid Mobility, door de NextGenerationEU gefinancierd programma). Het doel is om geautomatiseerde rijsystemen te ondersteunen. DITM partners ontwikkelen een systeemarchitectuur voor digitale infrastructuur, inclusief de kritieke kerntechnologieën voor lokalisatie, verkeersdiensten, digitale kaarten, laadinfrastructuur en continue veiligheidsvalidatie.
Voor meer informatie over het project kunt u contact opnemen met Alexandru Forrai ([email protected]), Ph.D., ingenieur en consultant bij Siemens Digital Industries Software.
Join the forum for Designers!
Your expertise is vital to the community. Join us and contribute your knowledge!
Join the Forum NowShare, learn and grow with the best professionals in the industry.