

Join the forum for Designers!
Your expertise is vital to the community. Join us and contribute your knowledge!
Join the Forum NowShare, learn and grow with the best professionals in the industry.
Proszę odkryć moc ANSYS Motion w symulacji dynamiki zespołu ramienia robota i optymalizacji jego wydajności.
Zrozumienie ANSYS Motion i jego możliwości
ANSYS Motion to solidne oprogramowanie symulacyjne, które umożliwia inżynierom analizowanie i przewidywanie zachowania systemów mechanicznych, w tym ramion robotów. Korzystając z ANSYS Motion, inżynierowie mogą symulować ruch i dynamikę ramion robotów, uzyskując kompleksowe zrozumienie tego, jak ramię porusza się i reaguje w różnych warunkach.
Kluczową zaletą ANSYS Motion jest dokładne modelowanie i symulacja skomplikowanych interakcji między różnymi komponentami ramienia robota, takimi jak przeguby, ogniwa i siłowniki. Dzięki temu inżynierowie mogą ocenić wydajność ramienia i zidentyfikować wszelkie potencjalne obszary wymagające poprawy lub problemy.
Co więcej, ANSYS Motion zapewnia szeroką gamę narzędzi analitycznych i funkcji, które pozwalają inżynierom badać wpływ różnych czynników na wydajność ramienia robota. Obejmuje to badanie wpływu różnych strategii sterowania, optymalizację trajektorii ramienia oraz ocenę jego stabilności i bezpieczeństwa.
Nasze ramiona robotyczne są celowo zaprojektowane tak, aby bez wysiłku manipulować obiektami za pomocą siłowników liniowych połączonych z blokami umieszczonymi na szynach. Ta innowacyjna konstrukcja umożliwia ramionom płynne manipulowanie obiektami poprzez kombinację ruchów bloków. W tej demonstracji ramię zademonstruje swoje możliwości, przenosząc masę 85 kg.
Projektowanie i budowa modelu ramienia robota w ANSYS Motion
Tworzenie modelu ramienia robota w ANSYS Motion wymaga procesu krok po kroku. Po pierwsze, inżynierowie muszą zebrać niezbędne informacje o ramieniu, takie jak jego wymiary, materiały i komponenty mechaniczne. Dane te służą jako podstawa do opracowania dokładnego modelu 3D przy użyciu narzędzi ANSYS 3D Design.
Po utworzeniu modelu 3D, inżynierowie mają możliwość określenia struktury kinematycznej ramienia, określając ilość i rodzaj przegubów i połączeń, a także zakres ruchu dla każdego przegubu. Dzięki temu ANSYS Motion może precyzyjnie symulować ruch i dynamikę ramienia.
Aby zasymulować tripteron, wykorzystujemy jeden stały przegub, aby bezpiecznie utrzymać szynę na miejscu. Dodatkowo istnieją trzy przeguby translacyjne, które umożliwiają ruch ramienia robota, a także sześć przegubów obrotowych, które tworzą połączenia między ramionami a całym systemem, naśladując łożyska. Proszę spojrzeć na rysunek 1, aby zobaczyć wizualną reprezentację tej konfiguracji.
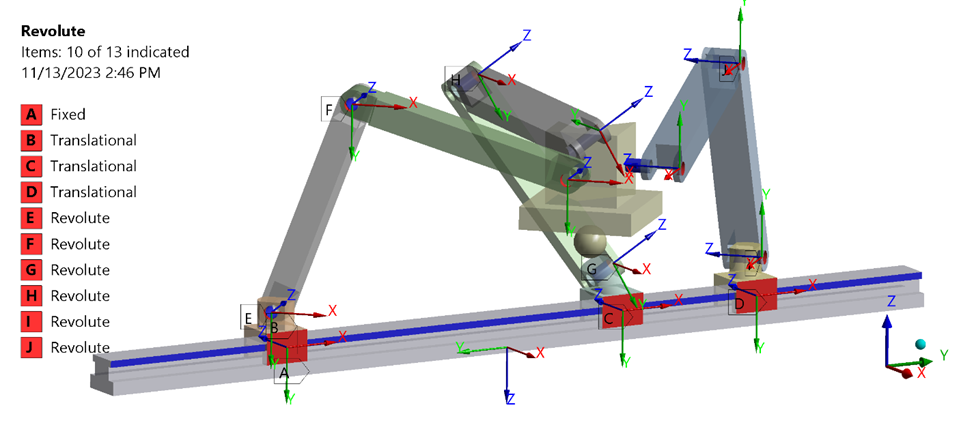
Rysunek 1: Definicje połączeń systemu robotycznego
Następnie inżynierowie muszą zdefiniować siłowniki ramienia, takie jak silniki lub układy hydrauliczne, oraz odpowiadające im strategie sterowania. Dzięki temu ANSYS Motion może symulować uruchamianie ramienia i reakcję na wejścia sterujące.
Jak pokazano na rysunku 2, mamy wyrażenia funkcyjne, które definiują ruchy każdego bloku, dzięki czemu możemy kontrolować obiekt w przestrzeni kartezjańskiej.
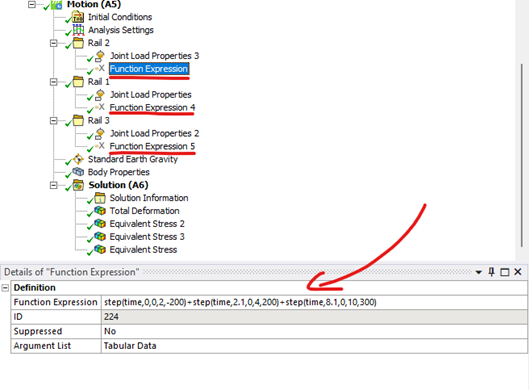
Rysunek 2: Definicja wyrażenia funkcyjnego
Ponadto model zawiera również obiekt właściwości ciała, jak pokazano na rysunku 3. Ta funkcja zapewniana przez ANSYS Motion pozwala na szybsze symulacje w porównaniu do zwykłych solverów. Zmieniając definicję ciała z ciała węzłowego na ciało modalne, solver może przeprowadzić analizę modalną dla określonych ciał, do których jest przypisany. Ta wydajna analiza dynamiki wielu ciał wykorzystuje informacje o sztywności do dokładnego obliczania naprężeń i odkształceń w ciałach.
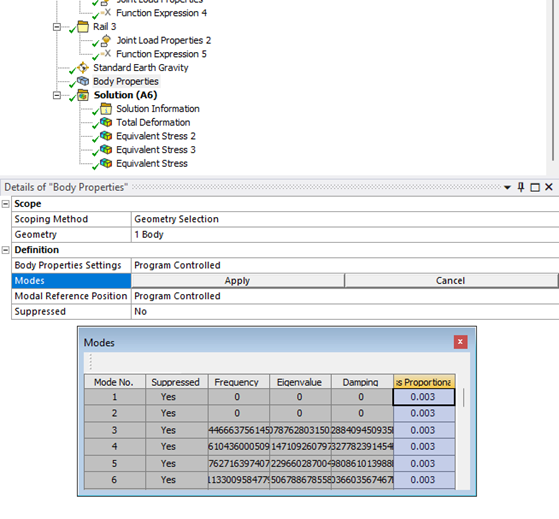
Rysunek 3: Definicja obiektu właściwości ciała
Po zdefiniowaniu struktury kinematycznej ramienia i siłowników, inżynierowie mogą przeprowadzić symulacje w ANSYS Motion, aby dokładnie przeanalizować działanie ramienia. Analiza ta obejmuje ocenę jego ruchu, sił, momentów obrotowych i innych parametrów dynamicznych w różnych scenariuszach operacyjnych.
Wyniki naprężeń, odkształceń i deformacji można wykreślić w dziedzinie czasu, jak pokazano na Animacji 1 poniżej, w celu optymalizacji wydajności ramion robotycznych.
Animacja 1: Wynik naprężenia w dziedzinie czasu
Siły, które trzy siłowniki muszą zastosować, aby manipulować obiektem, mogą być analizowane i wykreślane w celu wyboru siłowników, jak pokazano na rysunku 4. Dodatkowo można tworzyć i wykreślać różne ruchy, siły, momenty obrotowe i inne parametry dynamiczne w różnych warunkach pracy, aby zwiększyć efektywność systemu.
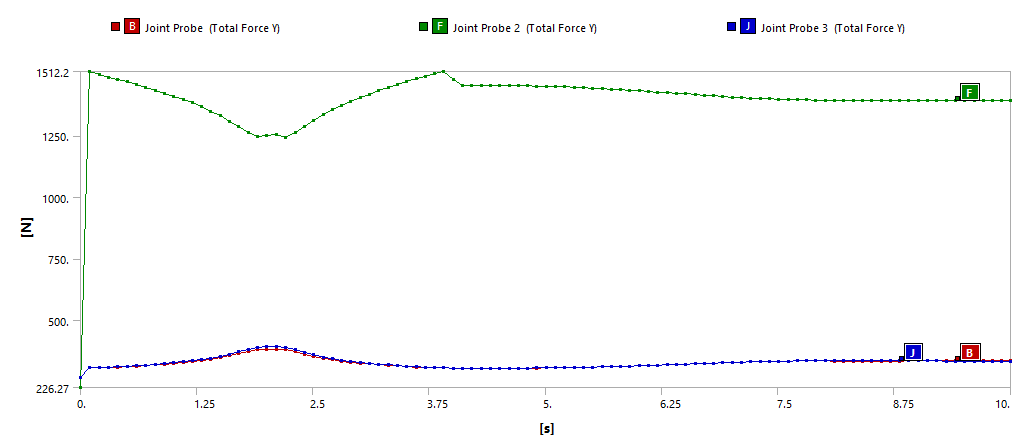
Rysunek 4: Reakcja siłowa z połączeń translacyjnych
Na podstawie wyników symulacji inżynierowie mogą następnie dokonać modyfikacji lub optymalizacji projektu w celu poprawy wydajności ramienia. Ten iteracyjny proces symulacji i udoskonalania projektu pomaga inżynierom stworzyć model ramienia robota, który spełnia pożądane kryteria wydajności.
Ogólnie rzecz biorąc, projektowanie i budowanie modelu ramienia robota w ANSYS Motion wymaga połączenia wiedzy z zakresu inżynierii mechanicznej, doświadczenia w symulacji oraz zrozumienia zamierzonego zastosowania ramienia i wymagań dotyczących wydajności.
Join the forum for Designers!
Your expertise is vital to the community. Join us and contribute your knowledge!
Join the Forum NowShare, learn and grow with the best professionals in the industry.