

Join the forum for Designers!
Your expertise is vital to the community. Join us and contribute your knowledge!
Join the Forum NowShare, learn and grow with the best professionals in the industry.
Przyszłość transportu zapewnia wszystkim bezpieczniejsze i bardziej mobilne życie, co przyniesie pozytywne skutki gospodarcze. Aby jednak spełnić tę obietnicę, konieczne jest przetestowanie nowych pojazdów i każdego podsystemu ich architektury, zwłaszcza że podsystemy stają się inteligentniejsze i bardziej złożone.
Zwiększona złożoność wymusza radykalną zmianę metod badań i nowych koncepcji kompleksowej weryfikacji i walidacji pojazdów zarówno w świecie fizycznym, jak i wirtualnym, co zostało ujęte w nowych przepisach.
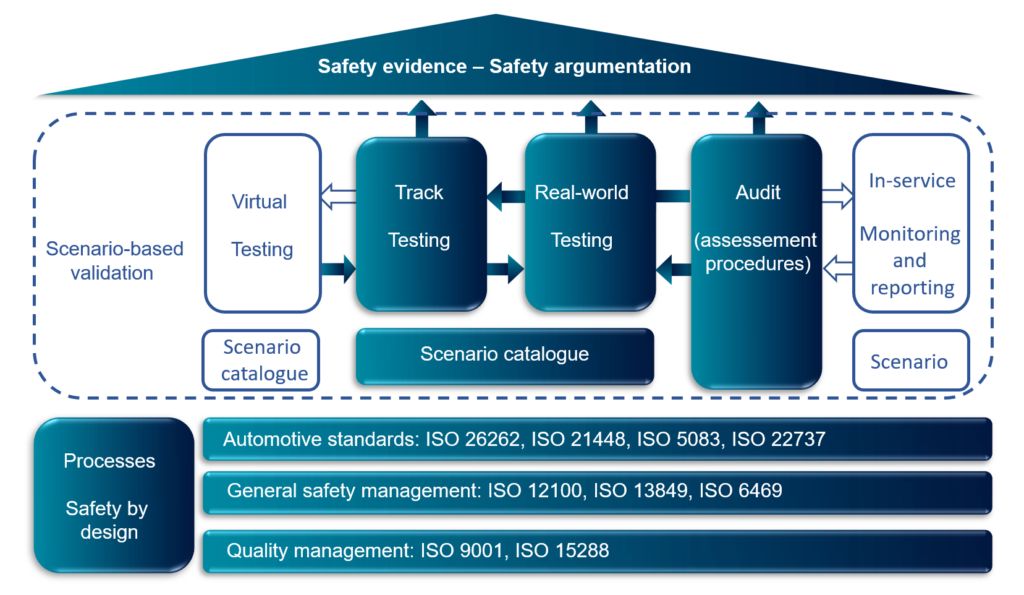
W tym sensie w lutym 2021 r. UNECE (Europejska Komisja Gospodarcza Organizacji Narodów Zjednoczonych) przedstawiła nową metodę oceny/testu jazdy zautomatyzowanej (NATM) – ramy wprowadzające wielofilarowe podejście do walidacji bezpieczeństwa jazdy zautomatyzowanej (zob. Ryc. 1) NATM, Wytyczne.
Ponadto w sierpniu 2022 r. Komisja UE przyjęła rozporządzenie 2022/1426 ustanawiające zasady stosowania rozporządzenia Parlamentu Europejskiego i Rady (UE) 2019/2144 w odniesieniu do jednolitych procedur i specyfikacji technicznych dotyczących homologacji typu zautomatyzowanego systemu jazdy (ADS) pojazdów w pełni zautomatyzowanych 2144, 1426.
Na czym polega wielofilarowa walidacja bezpieczeństwa AV?
Wielofilarowa walidacja bezpieczeństwa pojazdów zautomatyzowanych określa 5 filarów certyfikacji, które wspierają argumentację dotyczącą bezpieczeństwa. Oprócz trzech dobrze znanych filarów (testowanie toru, testy w świecie rzeczywistym I rewizja), o czym mowa w rozporządzeniu wirtualne testy I monitorowanie w trakcie eksploatacji.
Na tym blogu weryfikacja, walidacja, certyfikacja i zapewnienie są zdefiniowane/opisane w następujący sposób:
- Weryfikacja: to działanie polegające na określeniu, czy system spełnia wymagania, odpowiadające na pytanie: „Czy dobrze zbudowaliśmy system?”
- Walidacja: ocenia, czy system spełnia potrzeby użytkownika końcowego, odpowiadając na pytanie: „Czy zbudowaliśmy odpowiedni system”. Z drugiej strony, walidacja modelu ocenia, jak dobrze model odzwierciedla rzeczywistość.
- Zapewnienie: jest uzasadnioną pewnością, że system działa zgodnie z przeznaczeniem.
- Orzecznictwo: określa, czy system jest zgodny z zestawem kryteriów lub standardów.
W przypadku pojazdów autonomicznych społeczność naukowa wcześnie zdała sobie sprawę, że jedynie testy w warunkach rzeczywistych – z wykorzystaniem przebiegu na podstawie przebiegu – nie są wykonalne z ekonomicznego i technicznego punktu widzenia.
Jednym z głównych powodów jest to, że podczas testów w świecie rzeczywistym zdarzenia istotne dla bezpieczeństwa zdarzają się bardzo rzadko. Dlatego stało się oczywiste, że wirtualne testy będą odgrywać kluczową rolę w certyfikacji systemów zautomatyzowanej jazdy. Wynik wirtualnych testów może przyczynić się do argumentacji dotyczącej bezpieczeństwa wtedy i tylko wtedy, gdy symulacje są wiarygodne, co zostało pokrótce omówione w następnej sekcji i szczegółowo opisane w NATM, Wytyczne.
Ocena wiarygodności testów wirtualnych i symulacji
W przypadku testów wirtualnych zastępujemy jeden lub więcej elementów fizycznych modelem symulacyjnym.
Wirtualne testy wykorzystywane do walidacji systemów zautomatyzowanej jazdy (ADS) mogą osiągnąć różne cele, w zależności od ogólnej strategii walidacji i dokładności leżących u ich podstaw modeli symulacyjnych.
Niektóre z celów mogą być następujące:
- Zapewnij jakościową lub statystyczną pewność co do bezpieczeństwa całego systemu.
- Zapewnij jakościową lub statystyczną pewność działania określonych podsystemów/komponentów.
- Odkryj wymagające scenariusze do testowania w świecie rzeczywistym (np. testy w świecie rzeczywistym i testy na torze).
W przeciwieństwie do wszystkich potencjalnych korzyści, ograniczeniem tego podejścia jest jego nieodłączna ograniczona wierność modeli. Ponieważ modele mogą zapewnić jedynie przybliżoną reprezentację rzeczywistości, należy dokładnie ocenić przydatność modelu do zadowalającego zastąpienia świata rzeczywistego w celu sprawdzenia bezpieczeństwa ADS.
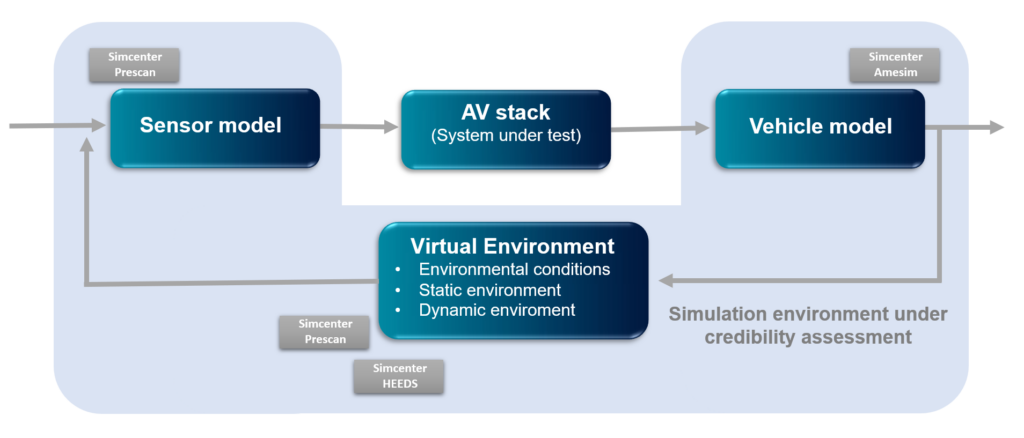
Dlatego też należy ocenić wiarygodność modeli symulacyjnych i środowiska symulacyjnego pokazanych na rys. 2 w celu określenia możliwości przeniesienia i wiarygodności wyników w porównaniu z wynikami w świecie rzeczywistym.
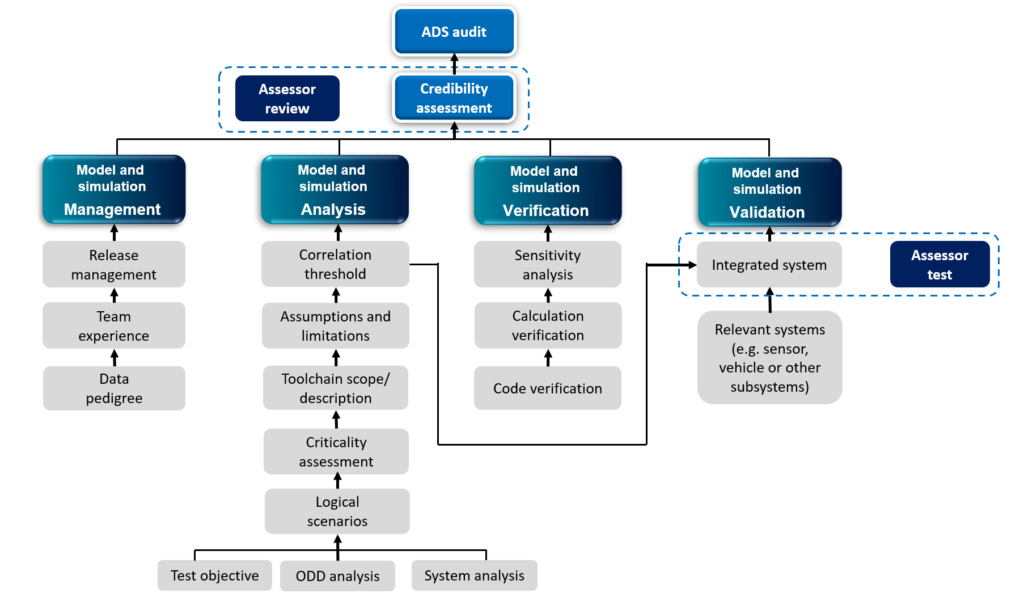
Oprócz modeli symulacyjnych i środowiska symulacyjnego ocena wiarygodności obejmuje także zarządzanie modelami i symulacjami. Wszystkie te aspekty ujęto na ryc. 3.
Przeczytaj białą księgę firmy Siemens
Aby dowiedzieć się więcej na temat procesów opracowywania pojazdów autonomicznych, przeczytaj ten artykuł biały papierktóry opisuje bardziej szczegółowo:
- Wyzwania związane z rozwojem AV
- proces projektowania pojazdów
- Testowanie pojazdów autonomicznych oparte na scenariuszach i przepływy pracy podczas testowania oparte na scenariuszach
- Przebieg oceny wiarygodności symulacji
Bieżąca działalność i odpowiednie regulacje
Począwszy od października 2022 r. RDW (Niderlandzki Urząd ds. Pojazdów), JRC (Wspólne Centrum Badawcze Komisji Europejskiej) i Siemens Industry Software Holandia BV ściśle współpracowały, aby zrozumieć, jak interpretować i jak stosować nowe rozporządzenie, a zwłaszcza jak stosować ramy oceny wiarygodności.
Dla lepszego zrozumienia rozważono konkretny przypadek użycia (automatyczna usługa parkowania samochodu) i każdy etap ram oceny wiarygodności symulacji został zastosowany do tego przypadku użycia.
Wyniki tych badań podsumowano w podręczniku oceny wiarygodności, który mógłby zostać wykorzystany jako wytyczna dla producentów OEM z branży motoryzacyjnej zainteresowanych wykorzystaniem testów wirtualnych jako filaru certyfikacji.
Na koniec, dla zainteresowanego czytelnika, w poniższych tabelach przedstawiono podsumowanie odpowiednich standardów i odnośników.
Przepisy EKG ONZ:
| Numer regulaminu | Nazwa rozporządzenia | Zamiar |
| Porozumienie z 1958 r | ECE/TRANS/WP.29/2016/2 | Porozumienie dotyczące przyjęcia zharmonizowanych przepisów technicznych Organizacji Narodów Zjednoczonych dotyczących pojazdów kołowych, wyposażenia i części, które mogą być montowane i/lub używane w pojazdach kołowych oraz warunków wzajemnego uznawania homologacji udzielonych na podstawie niniejszych Regulaminów Organizacji Narodów Zjednoczonych |
| R155 | E/ECE/TRANS/505/Rev.3/Add.154 | Jednolite przepisy dotyczące homologacji pojazdów pod kątem cyberbezpieczeństwa i systemu zarządzania cyberbezpieczeństwem |
| R156 | ECE/TRANS/WP.29/2020/80 | Jednolite przepisy dotyczące homologacji pojazdów w zakresie aktualizacji oprogramowania i systemu zarządzania aktualizacjami oprogramowania |
| R157 | ECE/TRANS/WP.29/2020/81 | Jednolite przepisy dotyczące homologacji pojazdów w zakresie systemów automatycznego utrzymywania pasa ruchu |
| NATM | ECE/TRANS/WP.29/2021/61 | Nowe wytyczne dotyczące metody oceny/testu jazdy zautomatyzowanej (NATM) dotyczące walidacji systemu jazdy zautomatyzowanej (ADS |
| Wytyczne | ECE/TRANS/WP.29-187-10/2022 | Wytyczne i zalecenia dotyczące wymagań bezpieczeństwa dla systemów automatycznego prowadzenia pojazdów |
Rozporządzenie UE:
| Numer regulaminu | Nazwa rozporządzenia | Zamiar |
| 858 | ROZPORZĄDZENIE PARLAMENTU EUROPEJSKIEGO I RADY (UE) 2018/858 | Homologacja typu i nadzór rynku pojazdów silnikowych i ich przyczep oraz układów, komponentów i oddzielnych zespołów technicznych przeznaczonych do tych pojazdów |
| 2144 | ROZPORZĄDZENIE PARLAMENTU EUROPEJSKIEGO I RADY (UE) 2019/2144 | Wymagania dotyczące homologacji typu pojazdów silnikowych i ich przyczep oraz układów, komponentów i oddzielnych zespołów technicznych przeznaczonych do tych pojazdów, w odniesieniu do ich ogólnego bezpieczeństwa oraz ochrony osób znajdujących się w pojeździe oraz niechronionych użytkowników dróg |
| 168 | ROZPORZĄDZENIE PARLAMENTU EUROPEJSKIEGO I RADY (UE) NR 168/2013 | Homologacja i nadzór rynku pojazdów dwu-, trzykołowych i czterokołowych |
| 1426 | ROZPORZĄDZENIE WYKONAWCZE KOMISJI (UE) 2022/1426 | Ustanawiające zasady stosowania rozporządzenia Parlamentu Europejskiego i Rady (UE) 2019/2144 w odniesieniu do jednolitych procedur i specyfikacji technicznych dotyczących homologacji typu systemu automatycznego prowadzenia pojazdu (ADS) pojazdów w pełni zautomatyzowanych |
Zaangażowanie Siemensa w projekty UE
Oprócz bieżących działań badawczych prowadzonych przez firmę Siemens, RDW i JRC w zakresie wielofilarowego podejścia do walidacji bezpieczeństwa pojazdów zautomatyzowanych, firma Siemens jest zaangażowana w następujące projekty UE:
- FOCETA (FOPodania dla Cciągły miinżynieria Tzardzewiały Aautonomia)
Konwergencja inżynierii opartej na danych i modelu. Podstawowy, ukierunkowany przełom naukowy FOCETA polega na zbieżności podejścia opartego na modelach i podejściu opartym na danych. Tę zbieżność dodatkowo komplikuje konieczność stopniowego stosowania weryfikacji i walidacji oraz unikania wysiłków w zakresie całkowitej ponownej weryfikacji i ponownej walidacji. - AIthena (numer projektu finansowanego przez UE 101076754). AIthena to projekt badawczo-innowacyjny dot Cpodłączony i Coperatywny Azautomatyzowany Mrozwiązań obility (CCAM), których celem jest budowanie godnych zaufania, możliwych do wyjaśnienia i odpowiedzialnych technologii CCAM.
- UrbanSmartPark (pierwszy projekt w ramach „KIC Mobilność Miejska„, europejska inicjatywa wspierana przez EIT, Europejski Instytut Innowacji i Technologii). UrbanSmartPark Projekt koncentruje się na rozwoju zautomatyzowanego parkingu śródmiejskiego na ulicach, zapewniającego szeroki zakres możliwych usług związanych z parkowaniem. Przeczytaj to blogu by dowiedzieć się więcej.
- WSCHÓD SŁOŃCA (Działania w zakresie badań i innowacji w ramach programu „Horyzont”, nr projektu 101069573 Zaproszenie HORIZON-CL5-2021-D6-01). The WSCHÓD SŁOŃCA Celem projektu jest ustanowienie wspólnych ram zapewnienia bezpieczeństwa, połączenie silosów i umożliwienie ich współpracy w zharmonizowany sposób.
- DITM (Digital Iinfrastruktura przyszłościowa Mobility, program finansowany przez NextGenerationEU). Mając na celu wspieranie zautomatyzowanych systemów jazdy, DITM partnerzy opracowują architekturę systemową dla infrastruktury cyfrowej, w tym kluczowe technologie podstawowe związane z lokalizacją, usługami drogowymi, mapami cyfrowymi, infrastrukturą ładowania i ciągłą walidacją bezpieczeństwa.
Aby dowiedzieć się więcej na temat projektu, skontaktuj się z Alexandru Forrai ([email protected]), doktorem, inżynierem i konsultantem w Siemens Digital Industries Software.
Join the forum for Designers!
Your expertise is vital to the community. Join us and contribute your knowledge!
Join the Forum NowShare, learn and grow with the best professionals in the industry.