Joshua662
Guest
Olá meninos têm à mão alguma despensa de acesso livre sobre os cálculos de acasalamento entre duas rodas dentadas um z45 interno e um pino z14? Agradeço a qualquer pessoa de bom coração que me possa ajudar.
Follow along with the video below to see how to install our site as a web app on your home screen.
Note: This feature may not be available in some browsers.
responder a esta pergunta não é fácil, ou melhor do que o padrão não há nada. algumas empresas que fazem engrenagens padrão têm uma alta amostragem e você pode permitir fazer as curvas por meios experimentais.Olá.
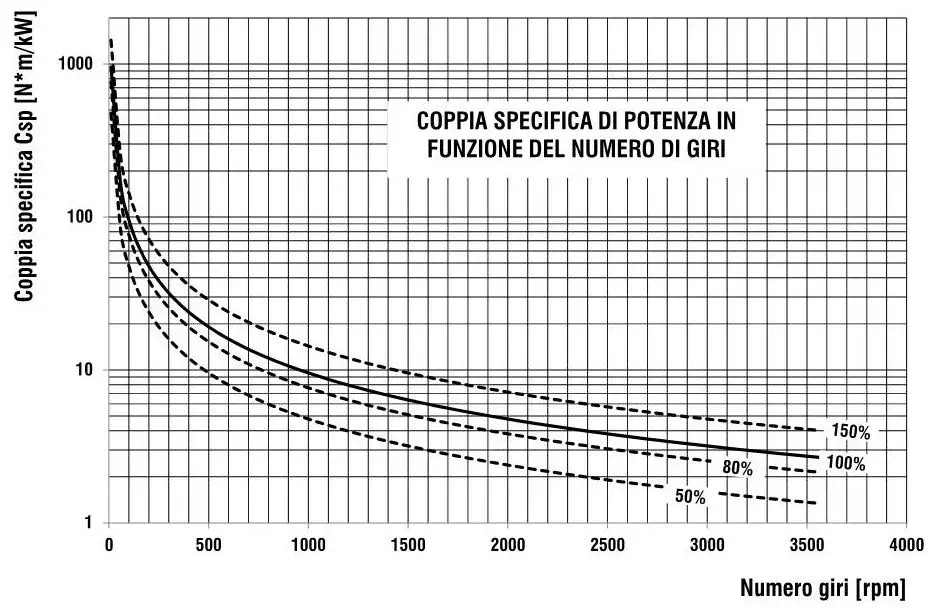
sobre engrenagens, durante o dimensionamento há alguma tabela padrão que conecta o poder às dimensões da engrenagem?
Eu explico. Eu tenho um dado poder entregue por um motor ligado a uma engrenagem, levando a roda mais conduzida. Eu tenho que dimensionar e eu tenho que ter as dimensões máximas que o volante e a conduta podem ter com o poder dado. Tipo: Roda de curva de energia / roda
Obrigado.
então, primeiro se você fizer um trem de engrenagem com z1 conectado ao z2 e z2 conectado ao z3 você criou um par de engrenagens (z1 e z3) com roda oziosa (z2) que só serve para reverter a bicicleta.assim, se você fizer em contas de excel ou mão, você verá que a roda em meio z2 pode ter qualquer valor de número de dente, desde que não exceda 5...6...7 como uma relação de redução.
assim o z2 pode ter 17 dentes.
você pode fazer uma configuração muito limitada que é:
♪
z2 = 17
z3 = 55
Talvez com correção de perfil.
Lembro-me que se você quiser pode fazê-lo diretamente com z1 e z3 se você não precisa ter o mesmo sentido de rotação entre entrada e saída.
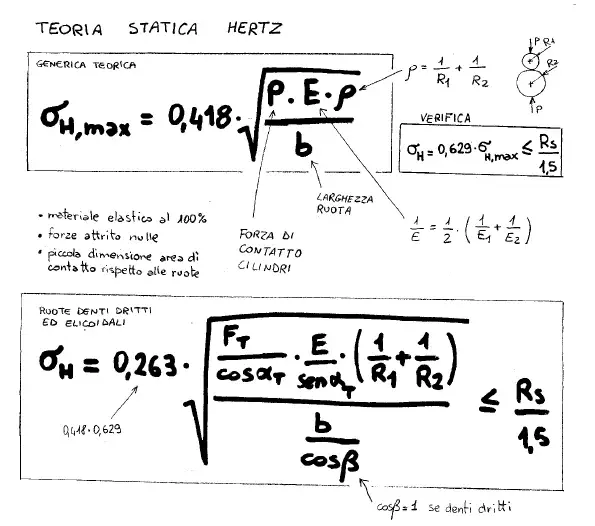
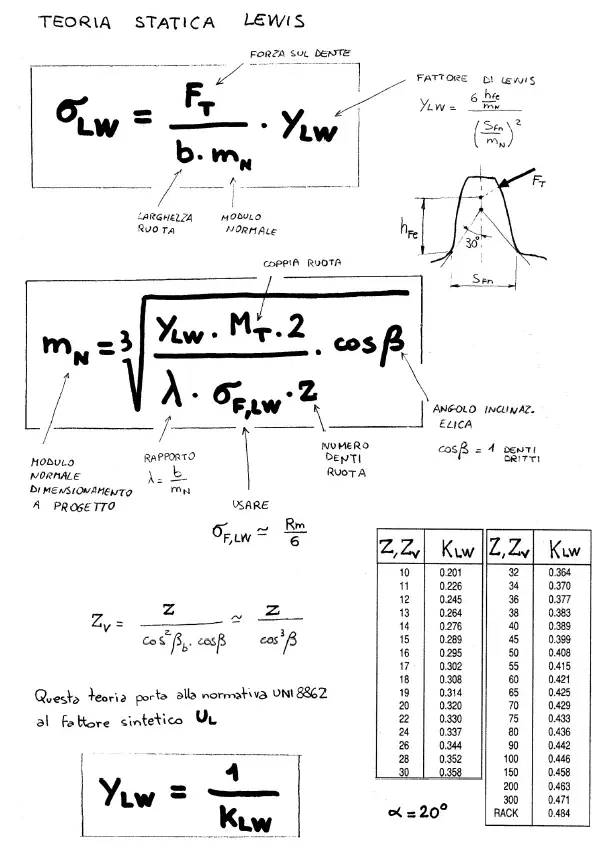
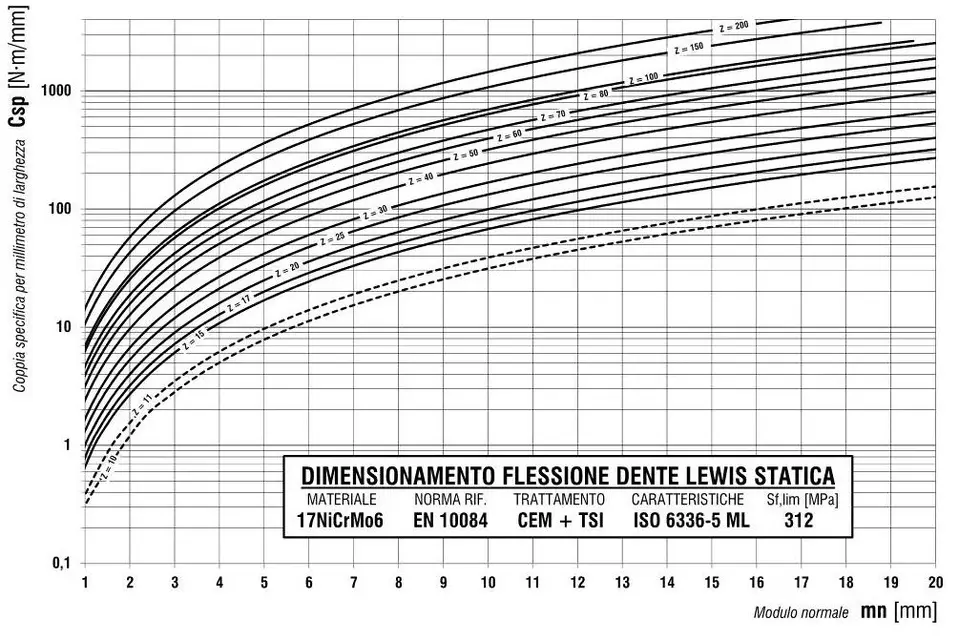
para dimensionar e verificar as engrenagens seguir um 8862 ou iso 6336. tanto você encontra na internet em várias dispensas e o primeiro você pode encontrá-lo explicado na parte introdutória também neste fórum onde falamos sobre a fórmula de lewis para o cálculo da dobra do dente e a fórmula de hertz para o pitting ou desgaste superficial com pressão de contato.
Treino fórmulas hertz e lewiss para usar.Se você multiplicar a primeira roda por um valor, você deve multiplicar também pela última roda.
mas quanto é a razão de redução do redutor nmrv040???? ? Se você não sabe que eu vejo difícil seguir em frente. .. nenhum dado (ou eu não os vi)
Olá a todos, sou novo no fórum. neste período de bloqueio eu tentei remover a teoria das rodas dentadas. Eu sou um designer e gostaria de construir um arquivo para transmissões de primeira aproximação dimensional. Quanto ao dimensionamento de flexão do dente e desgaste e fadiga superficial eu tomei como regulamentos de referência un 8862; agma ou iso 6336então, primeiro se você fizer um trem de engrenagem com z1 conectado ao z2 e z2 conectado ao z3 você criou um par de engrenagens (z1 e z3) com roda oziosa (z2) que só serve para reverter a bicicleta.assim, se você fizer em contas de excel ou mão, você verá que a roda em meio z2 pode ter qualquer valor de número de dente, desde que não exceda 5...6...7 como uma relação de redução.
assim o z2 pode ter 17 dentes.
você pode fazer uma configuração muito limitada que é:
♪
z2 = 17
z3 = 55
Talvez com correção de perfil.
Lembro-me que se você quiser pode fazê-lo diretamente com z1 e z3 se você não precisa ter o mesmo sentido de rotação entre entrada e saída.
para dimensionar e verificar as engrenagens seguir um 8862 ou iso 6336. tanto você encontra na internet em várias dispensas e o primeiro você pode encontrá-lo explicado na parte introdutória também neste fórum onde falamos sobre a fórmula de lewis para o cálculo da dobra do dente e a fórmula de hertz para o pitting ou desgaste superficial com pressão de contato.
Treino fórmulas hertz e lewiss para usar.Se você multiplicar a primeira roda por um valor, você deve multiplicar também pela última roda.
mas quanto é a razão de redução do redutor nmrv040???? ? Se você não sabe que eu vejo difícil seguir em frente. .. nenhum dado (ou eu não os vi)
Olá a todos, sou novo no fórum. Neste período de bloqueio eu tentei remover a teoria das rodas dentadas. Eu sou um designer e gostaria de construir um arquivo para dimensional, primeira aproximação, transmissões de engrenagem. Quanto ao dimensionamento de flexão do dente e desgaste e fadiga superficial eu tomei como referência as fórmulas colocadas por mechanicmg. então eu li, através de várias dispensas, os regulamentos uni 8862 e agma .qualquer parte clara algumas coisas.então, primeiro se você fizer um trem de engrenagem com z1 conectado ao z2 e z2 conectado ao z3 você criou um par de engrenagens (z1 e z3) com roda oziosa (z2) que só serve para reverter a bicicleta.assim, se você fizer em contas de excel ou mão, você verá que a roda em meio z2 pode ter qualquer valor de número de dente, desde que não exceda 5...6...7 como uma relação de redução.
assim o z2 pode ter 17 dentes.
você pode fazer uma configuração muito limitada que é:
♪
z2 = 17
z3 = 55
Talvez com correção de perfil.
Lembro-me que se você quiser pode fazê-lo diretamente com z1 e z3 se você não precisa ter o mesmo sentido de rotação entre entrada e saída.
para dimensionar e verificar as engrenagens seguir um 8862 ou iso 6336. tanto você encontra na internet em várias dispensas e o primeiro você pode encontrá-lo explicado na parte introdutória também neste fórum onde falamos sobre a fórmula de lewis para o cálculo da dobra do dente e a fórmula de hertz para o pitting ou desgaste superficial com pressão de contato.
Treino fórmulas hertz e lewiss para usar.Se você multiplicar a primeira roda por um valor, você deve multiplicar também pela última roda.
mas quanto é a razão de redução do redutor nmrv040???? ? Se você não sabe que eu vejo difícil seguir em frente. .. nenhum dado (ou eu não os vi)
Enquanto isso, obrigado pela respostaem fórmulas se houver z é o número de dentes verdadeiros. zv em vez é o número de dentes fictícios.
As fórmulas Hertz são fórmulas de cilindro no cilindro. Basta olhar para a teoria do contato e seguir as explicações que estão lá sobre o contato.
") Eu olhei em minhas notas antigas e em várias dispensas encontradas on-line. é tudo claro para mim para a fórmula teórica geral de sigmahmax com multiplicador 0.418 . então inseri todos os valores em referência ao caso específico de rodas dentadas com dentes helicoidais.
Eu olhei em minhas notas antigas e em várias dispensas encontradas on-line. é tudo claro para mim para a fórmula teórica geral de sigmahmax com multiplicador 0.418 . então inseri todos os valores em referência ao caso específico de rodas dentadas com dentes helicoidais.oi, se você tem o manual em formato digital eu iria dar uma olhada felizse vi serve io ho questo:
henriot - manual de engrenagem útil