

Participe do fórum para Designers!
Sua experiência é vital para a comunidade. Junte-se a nós e contribua com seu conhecimento!
Participe do fórum agoraCompartilhe, aprenda e cresça com os melhores profissionais do setor.
Descubra o poder do ANSYS Motion na simulação da dinâmica de montagem do braço do robô e na otimização de seu desempenho.
Entendendo o ANSYS Motion e suas capacidades
O ANSYS Motion é um software de simulação robusto que permite aos engenheiros analisar e prever o comportamento de sistemas mecânicos, incluindo braços de robôs. Ao utilizar o ANSYS Motion, os engenheiros podem simular o movimento e a dinâmica de braços de robôs, obtendo uma compreensão abrangente de como o braço se move e responde em diferentes condições.
Um dos principais pontos fortes do ANSYS Motion reside em sua modelagem e simulação precisas das intrincadas interações entre vários componentes de um braço de robô, como juntas, links e atuadores. Essa capacidade permite que os engenheiros avaliem o desempenho do braço e identifiquem possíveis áreas de melhoria ou problemas.
Além disso, o ANSYS Motion oferece uma ampla gama de ferramentas e recursos de análise que permitem aos engenheiros investigar o impacto de diferentes fatores sobre o desempenho de um braço de robô. Isso inclui examinar os efeitos de várias estratégias de controle, otimizar a trajetória do braço e avaliar sua estabilidade e segurança.
Nossos braços robóticos são projetados especificamente para manipular objetos sem esforço usando atuadores lineares conectados a blocos posicionados em trilhos. Esse design inovador permite que os braços manipulem objetos com perfeição por meio de uma combinação de movimentos de blocos. Nesta demonstração, o braço demonstrará sua capacidade carregando uma massa de 85 kg.
Projetando e construindo um modelo de braço robótico no ANSYS Motion
A criação de um modelo de braço de robô no ANSYS Motion requer um processo passo a passo. Em primeiro lugar, os engenheiros devem reunir informações essenciais sobre o braço, como suas dimensões, materiais e componentes mecânicos. Esses dados servem como base para o desenvolvimento de um modelo 3D preciso usando as ferramentas ANSYS 3D Design.
Depois de criar o modelo 3D, os engenheiros podem especificar a estrutura cinemática do braço, determinando a quantidade e o tipo de juntas e conexões, bem como a amplitude de movimento de cada junta. Isso permite que o ANSYS Motion simule com precisão o movimento e a dinâmica do braço.
Para simular o tripteron, utilizamos uma junta fixa para manter o trilho no lugar com segurança. Além disso, há três juntas translacionais que permitem que o braço robótico se mova, bem como seis juntas rotativas que estabelecem conexões entre os braços e todo o sistema, imitando rolamentos. Consulte a Figura 1 para ver uma representação visual dessa configuração.
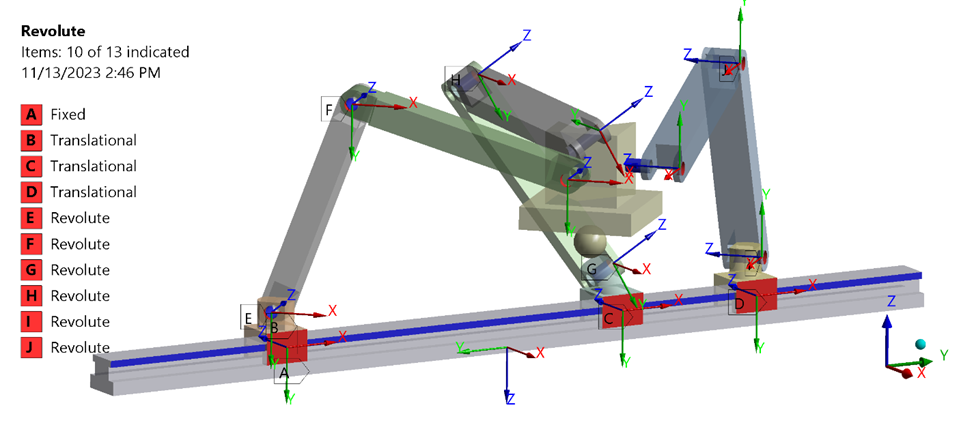
Figura 1: Definições de juntas do sistema robótico
Em seguida, os engenheiros precisam definir os atuadores do braço, como motores ou sistemas hidráulicos, e suas estratégias de controle correspondentes. Isso permite que o ANSYS Motion simule a atuação do braço e a resposta às entradas de controle.
Conforme mostrado na Figura 2, temos expressões de função que definem os movimentos de cada bloco para que possamos controlar o objeto no espaço cartesiano.
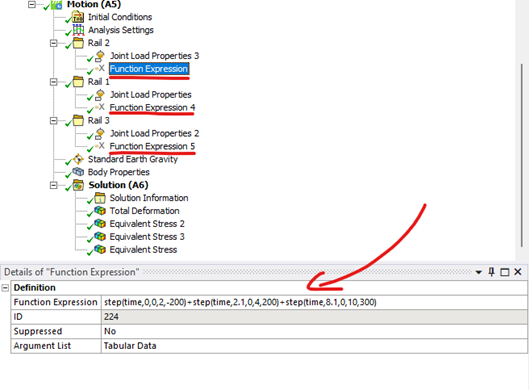
Figura 2: Definição da expressão de função
Além disso, o modelo também inclui um objeto de propriedade do corpo, conforme mostrado na figura 3. Esse recurso fornecido pelo ANSYS Motion permite simulações mais rápidas em comparação com os solvers regulares. Ao alterar a definição do corpo de corpo nodal para corpo modal, o solucionador pode executar a análise modal para os corpos específicos para os quais o escopo foi definido. Essa eficiente análise de dinâmica de múltiplos corpos utiliza informações de rigidez para calcular com precisão a tensão e as deformações nos corpos.
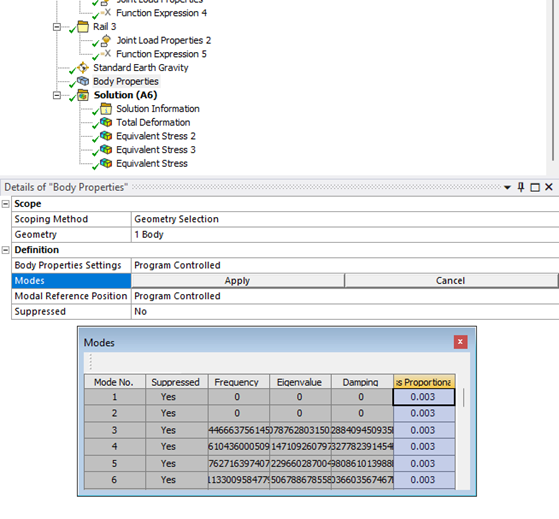
Figura 3: Definição do objeto de propriedade do corpo
Depois que a estrutura cinemática e os atuadores do braço são definidos, os engenheiros podem realizar simulações no ANSYS Motion para analisar minuciosamente o desempenho do braço. Essa análise abrange a avaliação de seu movimento, forças, torques e outros parâmetros dinâmicos em vários cenários operacionais.
Os resultados de tensão, deformação e deformação podem ser plotados no domínio do tempo, conforme demonstrado na Animação 1 abaixo, para otimizar o desempenho dos braços robóticos.
Animação 1: Resultado da tensão no domínio do tempo
As forças que os três atuadores precisam aplicar para manipular o objeto podem ser analisadas e plotadas para escolher os atuadores, conforme mostrado na Figura 4. Além disso, vários movimentos, forças, torques e outros parâmetros dinâmicos podem ser criados e plotados sob diferentes condições de operação para aumentar a eficácia do sistema.
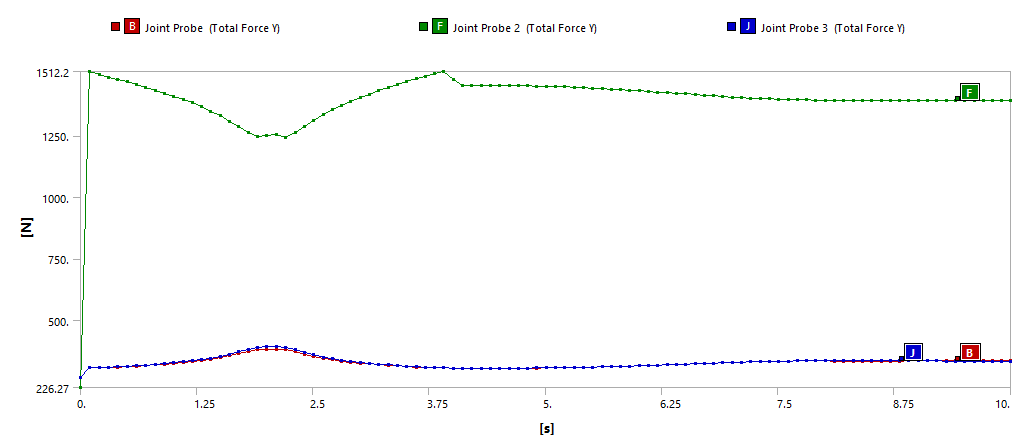
Figura 4: A reação de força das juntas translacionais
Com base nos resultados da simulação, os engenheiros podem então fazer modificações ou otimizações no projeto para melhorar o desempenho do braço. Esse processo iterativo de simulação e refinamento do projeto ajuda os engenheiros a criar um modelo de braço robótico que atenda aos critérios de desempenho desejados.
De modo geral, projetar e construir um modelo de braço de robô no ANSYS Motion requer uma combinação de conhecimento de engenharia mecânica, experiência em simulação e uma compreensão da aplicação pretendida e dos requisitos de desempenho do braço.
Participe do fórum para Designers!
Sua experiência é vital para a comunidade. Junte-se a nós e contribua com seu conhecimento!
Participe do fórum agoraCompartilhe, aprenda e cresça com os melhores profissionais do setor.