

Join the forum for Designers!
Your expertise is vital to the community. Join us and contribute your knowledge!
Join the Forum NowShare, learn and grow with the best professionals in the industry.
Будущее транспорта обещает сделать жизнь более безопасной и мобильной для всех, что приведет к положительным экономическим результатам. Однако, чтобы реализовать это обещание, необходимо тестировать новые автомобили и каждую подсистему их архитектуры, особенно по мере того, как подсистемы становятся все более интеллектуальными и сложными.
Возросшая сложность требует радикального изменения методов испытаний и новых концепций комплексной проверки и валидации транспортных средств как в физическом, так и в виртуальном мире, что отражено в новых правилах.
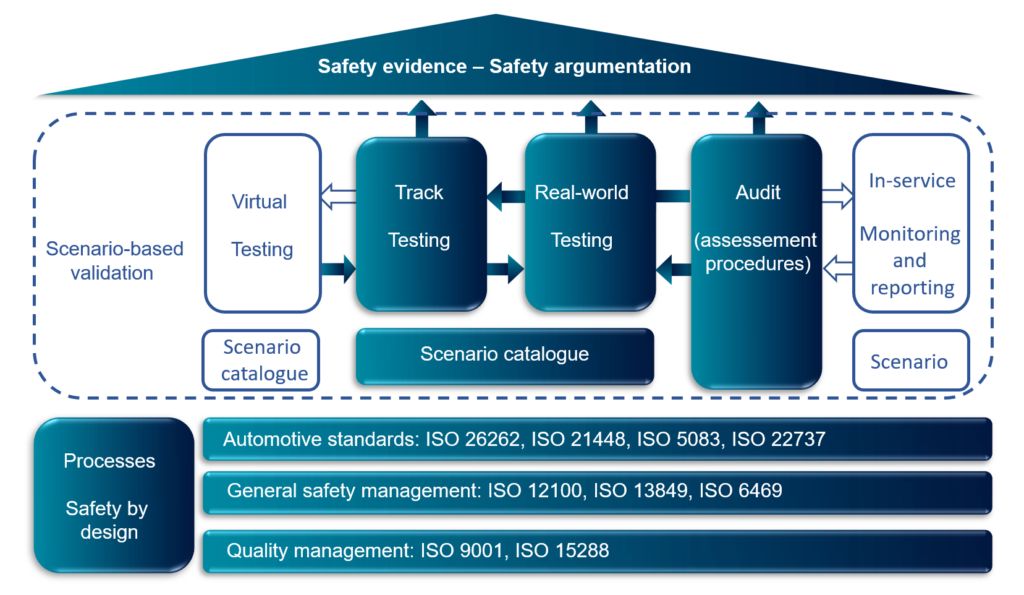
В этом смысле в феврале 2021 года ЕЭК ООН (Европейская экономическая комиссия Организации Объединенных Наций) представила Новый метод оценки/испытания автоматизированного вождения (NATM) – структуру, которая вводит многокомпонентный подход к подтверждению безопасности автоматизированного вождения (см. Рисунок 1) НАТМ, Методические рекомендации.
Кроме того, в августе 2022 года Комиссия ЕС приняла Регламент 2022/1426, устанавливающий правила применения Регламента (ЕС) 2019/2144 Европейского парламента и Совета в отношении единых процедур и технических спецификаций для утверждения типа. автоматизированной системы вождения (ADS) полностью автоматизированных транспортных средств 2144, 1426.
Какова многокомпонентная проверка безопасности AV?
Многокомпонентная проверка безопасности автоматизированных транспортных средств определяет 5 столпов сертификации, которые поддерживают аргументацию безопасности. В дополнение к трем известным столпам (трековое тестирование, реальное тестирование и аудит), в регламенте упоминается виртуальное тестирование и мониторинг в процессе эксплуатации.
В этом блоге верификация, валидация, сертификация и обеспечение определяются/описываются следующим образом:
- Проверка: деятельность, определяющая соответствие системы требованиям, отвечающая на вопрос: «Правильно ли мы построили систему?»
- Проверка: оценивает, соответствует ли система потребностям конечного пользователя, отвечая на вопрос: «Правильную ли мы построили систему». С другой стороны, проверка модели оценивает, насколько хорошо модель представляет реальность.
- Гарантия: это обоснованная уверенность в том, что система функционирует так, как задумано.
- Сертификация: определяет, соответствует ли система набору критериев или стандартов.
В случае с автономными транспортными средствами научное сообщество рано осознало, что только испытания в реальных условиях – с использованием охвата на основе пробега – неосуществимы с экономической и технической точки зрения.
Одна из основных причин заключается в том, что во время реальных испытаний события, важные для безопасности, случаются очень редко. Поэтому стало очевидно, что виртуальное тестирование будет играть ключевую роль в сертификации автоматизированных систем вождения. Результаты виртуальных испытаний могут способствовать обоснованию безопасности тогда и только в том случае, если моделирование достоверно. Это кратко обсуждается в следующем разделе и подробно описано в НАТМ, Методические рекомендации.
Виртуальное тестирование и оценка достоверности моделирования
В случае виртуального тестирования мы заменяем один или несколько физических элементов имитационной моделью.
Виртуальные тесты, используемые для проверки автоматизированных систем вождения (ADS), могут достигать разных целей в зависимости от общей стратегии проверки и точности базовых имитационных моделей.
Некоторые из целей могут быть следующими:
- Обеспечить качественную или статистическую уверенность в безопасности всей системы.
- Обеспечить качественную или статистическую уверенность в работе конкретных подсистем/компонентов.
- Откройте для себя сложные сценарии для тестирования в реальном мире (например, реальные тесты и трековые тесты).
В отличие от всех потенциальных преимуществ, ограничением этого подхода является присущая ему ограниченная точность моделей. Поскольку модели могут обеспечить лишь грубое представление реальности, необходимо тщательно оценить пригодность модели для удовлетворительной замены реального мира при проверке безопасности ADS.
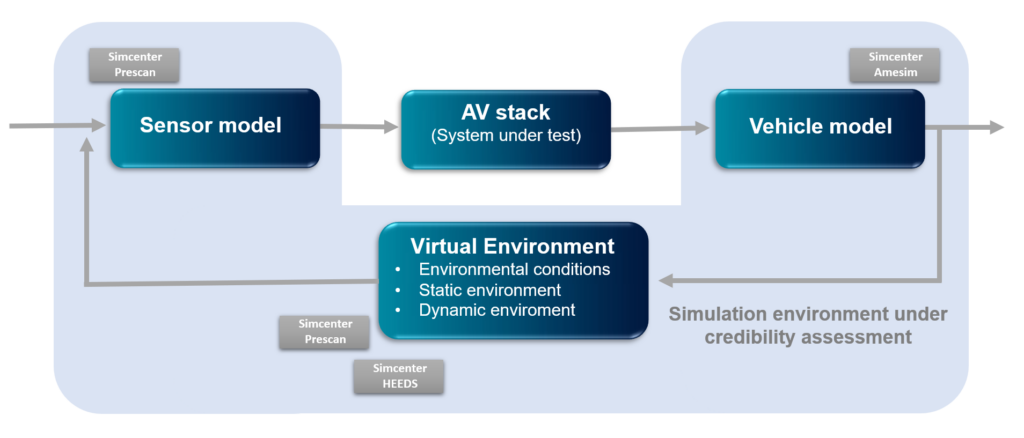
Поэтому необходимо оценить достоверность имитационных моделей и среды моделирования, показанных на рисунке 2, чтобы определить переносимость и надежность результатов по сравнению с реальными характеристиками.
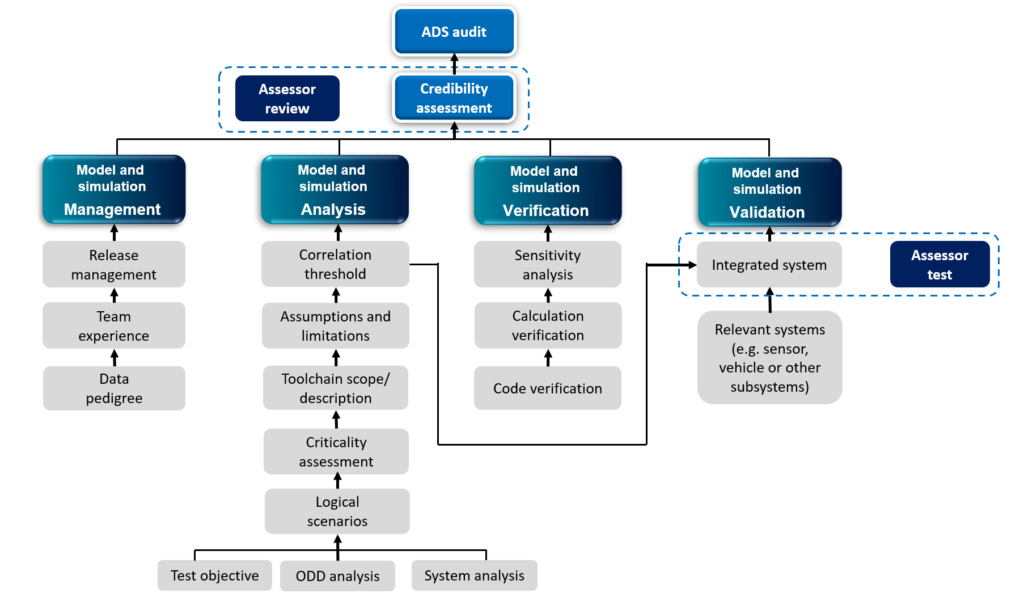
Помимо имитационных моделей и среды моделирования, оценка достоверности также распространяется на модель и управление имитацией. Все эти аспекты отражены на рис. 3.
Прочтите официальный документ Siemens
Чтобы узнать больше о рабочих процессах разработки беспилотных транспортных средств, прочитайте это белая бумагакоторый описывает более подробно:
- Проблемы, связанные с развитием AV
- Рабочий процесс проектирования транспортных средств
- Сценарное тестирование автономных транспортных средств и рабочие процессы сценарного тестирования.
- Рабочий процесс оценки достоверности моделирования
Текущая деятельность и соответствующие правила
Начиная с октября 2022 года, РДВ (Управление транспортных средств Нидерландов), JRC (Объединенный исследовательский центр Европейской комиссии) и Siemens Industry Software Нидерланды BV тесно сотрудничали, чтобы понять, как интерпретировать и как применять новые правила, особенно, как применять структуру оценки достоверности.
Для лучшего понимания был рассмотрен конкретный вариант использования (автоматическая парковка автомобилей служащим отеля), и к этому варианту использования был применен каждый этап системы оценки достоверности моделирования.
Результаты этих расследований были обобщены в справочнике по оценке достоверности, который может использоваться в качестве руководства производителями автомобильного оборудования, заинтересованными в использовании виртуального тестирования в качестве основы сертификации.
Наконец, для заинтересованного читателя в таблицах ниже представлены краткие сведения о соответствующих стандартах и ссылках.
Регламент ЕЭК ООН:
| Номер регламента | Название регламента | Цель |
| Соглашение 1958 года | ECE/TRANS/WP.29/2016/2 | Соглашение о принятии гармонизированных технических правил Организации Объединенных Наций для колесных транспортных средств, оборудования и частей, которые могут быть установлены и/или использованы на колесных транспортных средствах, и условий взаимного признания официальных утверждений, предоставленных на основе настоящих Правил Организации Объединенных Наций |
| 155 рэндов | E/ECE/TRANS/505/Rev.3/Add.154 | Единые положения, касающиеся утверждения транспортных средств в отношении кибербезопасности и системы управления кибербезопасностью |
| 156 рэндов | ECE/TRANS/WP.29/2020/80 | Единообразные положения, касающиеся официального утверждения транспортных средств в отношении обновлений программного обеспечения и системы управления обновлениями программного обеспечения. |
| 157 рэндов | ECE/TRANS/WP.29/2020/81 | Единообразные положения, касающиеся официального утверждения транспортных средств в отношении автоматизированных систем удержания полосы движения |
| НАТМ | ECE/TRANS/WP.29/2021/61 | Новый метод оценки/тестирования автоматизированного вождения (NATM) Рекомендации по проверке автоматизированной системы вождения (ADS) |
| Методические рекомендации | ECE/TRANS/WP.29-187-10/2022 | Руководящие указания и рекомендации по требованиям безопасности для автоматизированных систем вождения |
Регламент ЕС:
| Номер регламента | Название регламента | Цель |
| 858 | РЕГЛАМЕНТ (ЕС) 2018/858 ЕВРОПЕЙСКОГО ПАРЛАМЕНТА И СОВЕТА | Одобрение типа и надзор за рынком автомобилей и их прицепов, а также систем, узлов и отдельных технических узлов, предназначенных для таких транспортных средств |
| 2144 | РЕГЛАМЕНТ (ЕС) 2019/2144 ЕВРОПЕЙСКОГО ПАРЛАМЕНТА И СОВЕТА | Требования к одобрению типа автомобилей и их прицепов, а также систем, узлов и отдельных технических узлов, предназначенных для таких транспортных средств, в части их общей безопасности и защиты пассажиров транспортных средств и уязвимых участников дорожного движения |
| 168 | РЕГЛАМЕНТ (ЕС) № 168/2013 ЕВРОПЕЙСКОГО ПАРЛАМЕНТА И СОВЕТА | Разрешение и надзор за рынком двух- или трехколесных транспортных средств и квадрициклов |
| 1426 | РЕГЛАМЕНТ КОМИССИИ ПО ВНЕДРЕНИЮ (ЕС) 2022/1426 | Установление правил применения Регламента (ЕС) 2019/2144 Европейского парламента и Совета в отношении единых процедур и технических спецификаций для утверждения типа автоматизированной системы вождения (ADS) полностью автоматизированных транспортных средств. |
Участие Siemens в проектах ЕС
В дополнение к текущей исследовательской деятельности, проводимой Siemens, RDW и JRC по многокомпонентному подходу к проверке безопасности автоматизированных транспортных средств, Siemens участвует в следующих проектах ЕС:
- ФОСЕТА (ФОоснования для Снепрерывный Эразработка Тнержавеющий Аавтономия)
Конвергенция проектирования, основанного на данных и моделях. Основополагающий целенаправленный научный прорыв ФОСЕТА заключается в сближении подходов, основанных на моделях и данных. Эта конвергенция еще больше осложняется необходимостью применять проверку и проверку постепенно и избегать полной повторной проверки и повторной проверки. - Афина (Проект, финансируемый ЕС, номер 101076754). Афина это исследовательский и инновационный проект по Сподключен и Соперативный Аавтоматизированный МObility (CCAM), целью которого является создание надежных, объяснимых и подотчетных технологий CCAM.
- ГородскойСмартПарк (первый проект в рамках «KIC Городская мобильность«, европейская инициатива, поддержанная EIT, Европейским институтом инноваций и технологий). ГородскойСмартПарк Проект направлен на развитие автоматизированной уличной парковки в центре города, предоставляющей широкий спектр возможных услуг, связанных с парковкой. Прочитай это блог узнать больше.
- ВОСХОД (Horizon Research and Innovation Actions, проект № 101069573. Звоните в HORIZON-CL5-2021-D6-01). ВОСХОД Проект направлен на создание общей системы обеспечения безопасности, соединяющей разрозненные подразделения и обеспечивающей их гармонизированное сотрудничество.
- ДИТМ (Дцифровой яИнфраструктура для будущего Мobility, программа NextGenerationEU, финансируемая ЕС). Стремясь поддержать автоматизированные системы вождения, ДИТМ партнеры разрабатывают системную архитектуру для цифровой инфраструктуры, включая критически важные базовые технологии, связанные с локализацией, службами дорожного движения, цифровыми картами, инфраструктурой зарядки и непрерывной проверкой безопасности.
Чтобы узнать больше о проекте, свяжитесь с Александру Форрай ([email protected]), доктором философии, коллегой-инженером и консультантом Siemens Digital Industries Software.
Join the forum for Designers!
Your expertise is vital to the community. Join us and contribute your knowledge!
Join the Forum NowShare, learn and grow with the best professionals in the industry.