

Join the forum for Designers!
Your expertise is vital to the community. Join us and contribute your knowledge!
Join the Forum NowShare, learn and grow with the best professionals in the industry.
ANSYS Motion’ın robot kolu montaj dinamiklerini simüle etme ve performansını optimize etme konusundaki gücünü keşfedin.
ANSYS Hareket ve Yeteneklerini Anlamak
ANSYS Motion, mühendislerin robot kolları da dahil olmak üzere mekanik sistemlerin davranışını analiz etmelerini ve tahmin etmelerini sağlayan sağlam bir simülasyon yazılımıdır. Mühendisler ANSYS Motion kullanarak robot kollarının hareket ve dinamiklerini simüle edebilir, kolun farklı koşullarda nasıl hareket ettiği ve tepki verdiğine dair kapsamlı bir anlayış kazanabilirler.
ANSYS Motion’ın önemli bir gücü, bir robot kolunun eklemler, bağlantılar ve aktüatörler gibi çeşitli bileşenleri arasındaki karmaşık etkileşimlerin doğru modellenmesi ve simülasyonunda yatmaktadır. Bu özellik, mühendislerin kolun performansını değerlendirmesini ve iyileştirme yapılabilecek potansiyel alanları veya sorunları belirlemesini sağlar.
Ayrıca ANSYS Motion, mühendislerin farklı faktörlerin bir robot kolunun performansı üzerindeki etkisini araştırmasına olanak tanıyan çok çeşitli analiz araçları ve özellikleri sunar. Bu, çeşitli kontrol stratejilerinin etkilerini incelemeyi, kolun yörüngesini optimize etmeyi ve stabilitesini ve güvenliğini değerlendirmeyi içerir.
Robotik kollarımız, raylar üzerine yerleştirilmiş bloklara bağlı lineer aktüatörler kullanarak nesneleri zahmetsizce manipüle etmek için özel olarak tasarlanmıştır. Bu yenilikçi tasarım, kolların blok hareketlerinin bir kombinasyonu yoluyla nesneleri sorunsuz bir şekilde manipüle etmesini sağlar. Bu gösterimde kol, 85 kg’lık bir kütleyi taşıyarak kabiliyetini gösterecektir.
ANSYS Motion’da bir robot kolu modeli tasarlama ve oluşturma
ANSYS Motion’da bir robot kolu modeli oluşturmak adım adım ilerleyen bir süreç gerektirir. İlk olarak, mühendisler kol hakkında boyutları, malzemeleri ve mekanik bileşenleri gibi temel bilgileri toplamalıdır. Bu veriler, ANSYS 3D Tasarım araçlarını kullanarak doğru bir 3D model geliştirmek için temel oluşturur.
Mühendisler, 3D modeli oluşturduktan sonra, kolun kinematik yapısını belirleme, eklemlerin ve bağlantıların miktarını ve türünü ve ayrıca her eklem için hareket aralığını belirleme olanağına sahiptir. Bu, ANSYS Motion’ın kolun hareketini ve dinamiklerini hassas bir şekilde simüle etmesini sağlar.
Tripteronu simüle etmek için, rayı güvenli bir şekilde yerinde tutmak üzere bir sabit mafsal kullanıyoruz. Ek olarak, robotik kolun hareket etmesini sağlayan üç öteleme ekleminin yanı sıra kollar ve tüm sistem arasında bağlantı kuran ve yatakları taklit eden altı döner eklem vardır. Bu kurulumun görsel bir temsili için Şekil 1’e bakınız.
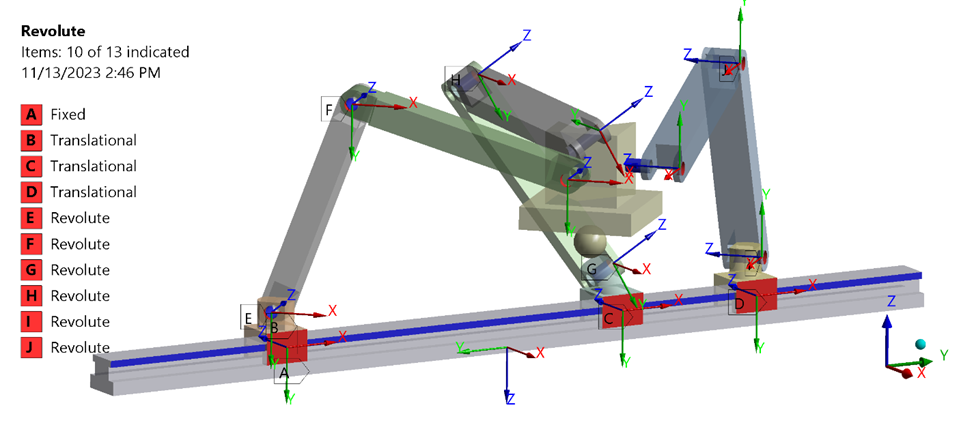
Şekil 1: Robotik Sistemin Eklem Tanımları
Ardından, mühendislerin kolun motorlar veya hidrolik sistemler gibi aktüatörlerini ve bunlara karşılık gelen kontrol stratejilerini tanımlamaları gerekir. Bu, ANSYS Motion’ın kolun çalıştırılmasını ve kontrol girdilerine yanıt vermesini simüle etmesini sağlar.
Şekil 2’de gösterildiği gibi, nesneyi kartezyen uzayda kontrol edebilmemiz için her bloğun hareketlerini tanımlayan fonksiyon ifadelerine sahibiz.
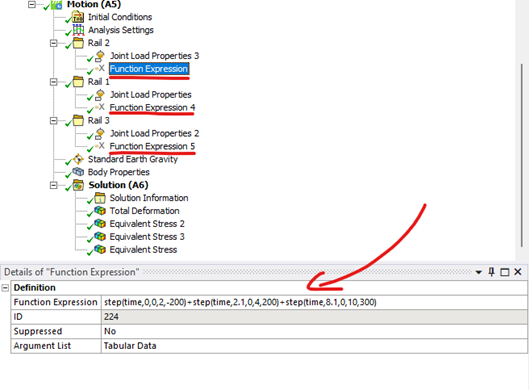
Şekil 2: Fonksiyon İfade Tanımı
Ayrıca, model şekil 3’te gösterildiği gibi bir gövde özelliği nesnesi de içerir. ANSYS Motion tarafından sağlanan bu özellik, normal çözücülere kıyasla daha hızlı simülasyonlara olanak tanır. Gövde tanımını nodal gövdeden modal gövdeye değiştirerek, çözücü kapsamına aldığı belirli gövdeler için modal analiz gerçekleştirebilir. Bu verimli çoklu gövde dinamiği analizi, gövdeler üzerindeki gerilme ve gerilmeleri doğru bir şekilde hesaplamak için sertlik bilgilerini kullanır.
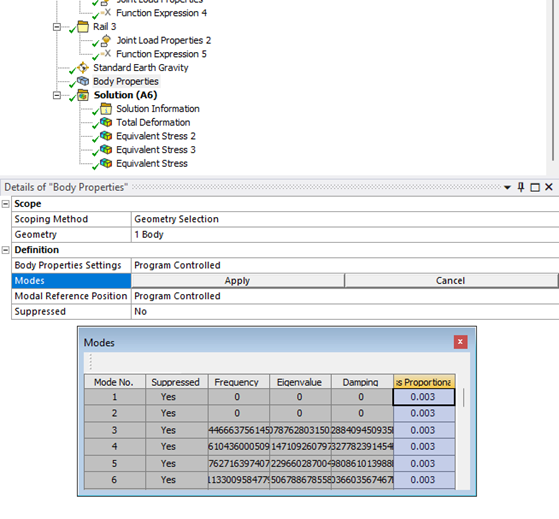
Şekil 3: Gövde Özelliği Nesne Tanımı
Kolun kinematik yapısı ve aktüatörleri tanımlandıktan sonra, mühendisler kolun performansını kapsamlı bir şekilde analiz etmek için ANSYS Motion’da simülasyonlar gerçekleştirebilir. Bu analiz, çeşitli operasyonel senaryolarda kolun hareketinin, kuvvetlerinin, torklarının ve diğer dinamik parametrelerinin değerlendirilmesini kapsar.
Gerilme, gerinim ve deformasyon sonuçları, robotik kolların performansını optimize etmek için aşağıdaki Animasyon 1’de gösterildiği gibi zaman alanında çizilebilir.
Animasyon 1: Zaman Alanında Stres Sonucu
Üç aktüatörün nesneyi manipüle etmek için uygulaması gereken kuvvetler, Şekil 4’te gösterildiği gibi aktüatörleri seçmek için analiz edilebilir. Ayrıca, sistemin etkinliğini artırmak için farklı çalışma koşulları altında çeşitli hareket, kuvvetler, torklar ve diğer dinamik parametreler oluşturulabilir ve çizilebilir.
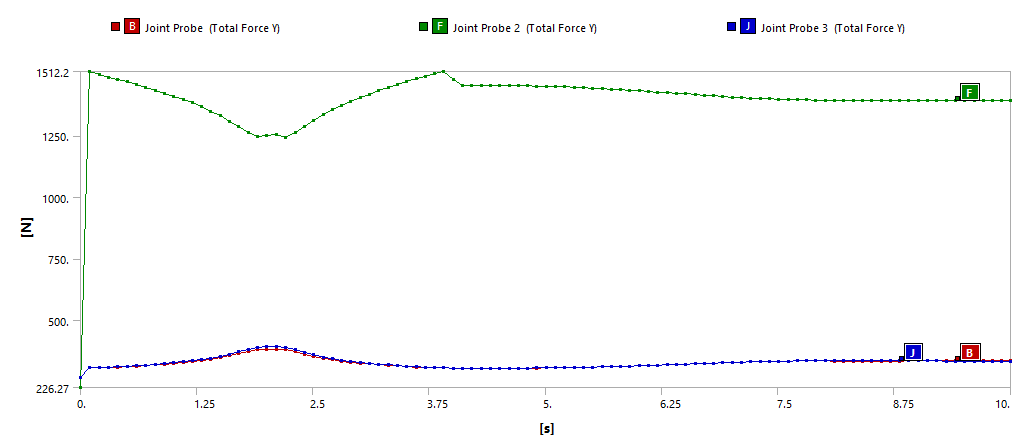
Şekil 4: Öteleme Eklemlerinden Kaynaklanan Kuvvet Reaksiyonu
Mühendisler daha sonra simülasyon sonuçlarına dayanarak kolun performansını artırmak için tasarım değişiklikleri veya optimizasyonları yapabilirler. Bu yinelemeli simülasyon ve tasarım iyileştirme süreci, mühendislerin istenen performans kriterlerini karşılayan bir robot kolu modeli oluşturmasına yardımcı olur.
Genel olarak, ANSYS Motion’da bir robot kolu modeli tasarlamak ve oluşturmak, makine mühendisliği bilgisi, simülasyon uzmanlığı ve kolun amaçlanan uygulama ve performans gereksinimlerini anlamanın bir kombinasyonunu gerektirir.
Join the forum for Designers!
Your expertise is vital to the community. Join us and contribute your knowledge!
Join the Forum NowShare, learn and grow with the best professionals in the industry.