Vor ein paar Stellen sagte ich, dass die Trägerverlegung des Endorgans aus einem Teil der Position und einer der Orientierung besteht:
wobei q = (q1, q2, ..., qn) der Vektor der Gelenkvariablen ist und x = [p, fi] = [(x1, x2, x3), fi) è il vettore posa (= posizione + orientamento) nello spazio operativo. Perché non esplicito il vettore orientamento fi? Beh...lo vedremo tra un po', non è così ovvio.
Ich habe in der Praxis nicht spezifiziert, was der Träger fi ist, der die Orientierung darstellt. Nun, wir sehen uns jetzt näher.
Ziel ist es, eine komplette Trajektorie zu beschreiben, die je nach Zeit zwei Punkte im Raum vereint. Wenn es eher intuitiv ist, eine Positionstrajektorie zwischen zwei Punkten wie einem Segment oder einem Umfangsbogen zu erzeugen, ist es nicht so intuitiv, eine Trajektorie, beispielsweise "Linie" zwischen zwei Richtungen zu erzeugen.
Rotationsmatrizenwir haben gesehen, obwohl nicht im formalen Detail, die Rotationsmatrizen. mittels einer Rotationsmatrix ist es möglich, einen beschriebenen Vektor bezüglich einer Referenztern zu nehmen und gegenüber einer anderen, gegenüber der ersten gedrehten Terne zu beschreiben. Daher kann eine Rotationsmatrix als Beschreibung der Orientierung eines Terna gegenüber einem anderen betrachtet werden.
eine Rotationsmatrix im Euclide-Raum, hat drei Zeilen und drei Spalten, für insgesamt neun Elemente, offensichtlich nicht alle unabhängig. nur drei seiner Elemente sind unabhängig. Es bedeutet, dass, wenn wir eine Rotationsmatrix für die Beschreibung einer Orientierung verwenden wollen, wir, Punkt für Punkt, neun Elemente, von denen drei durch stündliche Gleichungen berechnet werden, verwalten und zu diesen sechs Kongruenzgleichungen hinzufügen, die die orthogonale Matrix an jedem Punkt halten.
Es ist nicht viel, in der Tat werden die Rotationsmatrizen für diesen Zweck nicht verwendet, weil die starke Redundanz der Informationen in ihrer Struktur inhärent sind.
Angoli di eulerowir sahen, dass die Parameter für die Beschreibung der Orientierung drei sind. Es ist dann spontan zu sagen, dass die beste Lösung eine sogenannte "Minimumbeschreibung" oder eine Drei-Parameter-Beschreibung ist. So ist es nicht, aber wir werden sehen, warum.
die am weitesten verbreitete Darstellung zu drei Parametern wird als Beschreibung durch "eulero Winkel" bezeichnet.
Diese Darstellung besteht darin, eine Orientierung als Folge von drei aufeinanderfolgenden Drehungen um drei Achsen zu beschreiben.
Da die Achsen drei sind und die aufeinanderfolgenden Drehungen drei sein müssen, haben wir 27 mögliche Kombinationen, aber von diesen müssen wir alle beseitigen, in denen zwei aufeinander folgende Achsen zusammenfallen. 12 verschiedene Ablagerungen von Eulenwinkeln bleiben übrig, um eine Orientierung durch drei Parameter zu beschreiben und mit dem zu wissen, was Terna beschrieben wurde.
Vielleicht ist es hier der Fall der Erinnerung, dass für Rotationen nicht unendlichsimal, das Tensor-Feld, das sie beschreibt, nicht die commutative Eigenschaft genießt. wenn ruoto von alpha um x, von Beta um y und von Reichweite um z ich erreichen einen Durst. wenn die drei Drehungen in einer anderen Reihenfolge auftreten, erhalten Sie im Allgemeinen eine andere Reihenfolge. um es einfach zu verstehen, nehmen Sie einen Parallelepipedo und machen einen Test, für Einfachheit mit allen Drehungen von 90°.
Eines der bekanntesten Tarts ist die sogenannte "Rpy", die üblicherweise verwendet wird, um die Anordnung im Raum der Flugzeuge und Rumpfe zu beschreiben. "rpy" steht für:
Rolle, also der Rollenwinkel, der Winkel um die Längsachse
Steigung, d.h. der Becherwinkel, um die Querachse
Ja, hol den Anlandungswinkel um die Querachse.
Die Orientierung eines Kugelgelenkes kann durch Zuordnung der r-p-y-Parameter zu den 4-5-6 Achsen beschrieben werden. bequem, was? Leider, nein...
Leider werden auch die Ecken von eulero wenig in der Robotik für eine Reihe von strukturellen Problemen im Zusammenhang mit der jeweiligen mathematischen Struktur verwendet. Viele Roboter entlarven das in eulous Winkel ausgedrückte Set, aber in Wirklichkeit verwendet der Controller für ihre Berechnungen eines der beiden nachher beschriebenen Systeme.
Was sind die Probleme? Aufzählen.
- zunächst die Winkel von eulero präsentieren eine Reihe von Singularität der Darstellung. Dies ist ein ernsteres Problem als die bereits beschriebenen Singularitäten des Jakobins. Tatsächlich sind die Singularitäten des Jakobin der mathematische Korrespondent von physikalisch existierenden filmischen Singularitäten. Selbstverständlich müssen diese Singularitäten in der filmischen Struktur des Manipulators physisch vorhanden sein. im Falle der Eulero-Ecken werden diese Singularitäten (genannte "Repräsentation") ausschließlich mit der mathematischen Struktur der gewählten Darstellung verknüpft. Es handelt sich also nicht um die Grenzen des Manipulators, sondern nur um die numerischen Grenzen, die nach dem für Berechnungen verwendeten spezifischen Verfahren eingeführt werden. In der Tat sind die Singularitäten relativ zu einem bestimmten Terna nicht in den anderen Taren vorhanden, dies hat es in der Vergangenheit gewünscht, mehr Taren mit Singularität der Darstellung nicht ausgerichtet zu verwenden, und von einander zu "scan" die Probleme zu springen. Diese Methode hat den unbestrittenen Nachteil, dass man Gleichungen schreiben und lösen muss, um die Beschreibungen an den Stellen, an denen Sie sich entscheiden, sie zu vernähen, noch mehr die Methode zu komplizieren.
- sie haben eine ziemlich instabile mathematische Struktur. insbesondere um Ecken nahe 0° und 180°, wo die Brüste und die Dinge abbrechen oder sehr klein werden.
- sie werden im Betriebsraum kontrastuitiv abgebildet. Es ist schwierig zu erklären, ohne zu sehen, was Sie beschreiben, aber wir stellen uns vor, dass wir eine Drehung um eine einzige Achse beschreiben wollen, außer die für die Darstellung verwendet werden. beispielsweise eine 45°-Achse im Vergleich zu den drei koordinierten Plänen. Wie konntest du das machen? Intuitiv könnte die Rotation genau um diese Achse erfolgen. Sehr einfach, nicht wahr? Vielmehr beschreibt eine durch eine Darstellung der Winkel von Eulero realisierte lineare Trajektorie diese einfache Rotation auf viel komplexere Weise. Sie sehen, dass sich das Objekt entlang mehrerer Achsen mit einer "schlechten" Bewegung, kontrastuitiv und mit inhomogener Geschwindigkeit dreht, dann natürlich am Ende der Trajektorie mit der erforderlichen Anordnung.
Winkeldann überwinden wir die Schwierigkeiten der Darstellung durch die Ecken von eulero. wir müssen eine "minimale" Darstellung von nur drei Parametern aufgeben. "let's pawn" Einführung einer vier-Parameter-Darstellung, dann redundant, die eine Kongruenzgleichung benötigen, aber damit gewinnen wir eine Reihe von Vorteilen.
die erste Darstellung zu vier Parametern, die einfachste, ist die "Achse / Winkel". Wenn ich zwei Sätze im Raum habe, habe ich immer die Möglichkeit, eine einzige Drehung um eine präzise Achse zu identifizieren, die die zweite bezüglich der ersten beschreiben kann.
Wenn ich als Parameter die Führung dieser Achse und den Winkel um sie herum nutze, machte ich Bingo.
Ich habe nur eine Singularität, wenn das Drehwinkeldach null ist, habe ich keine Möglichkeit zu wissen, um welche Achse ausgeführt werden sollte. wenig schlecht, denn es ist keine Singularität der Repräsentation, sondern eine physische Singularität. Wenn ich einen Nullwinkel habe, dann keine Rotation, wird es ausreichen, um mathematische Konsistenz durch willkürliche Wahl einer Achse zu geben.
die Kongruenzgleichung zu addieren, ist natürlich, dass die Summe der Quadrate der leitenden Dinge gleich einem ist.
die Vorteile sind bemerkenswert. wir lösten die Probleme der Singularität der Darstellung, wir haben eine intrinsisch lineare mathematische Struktur, weil auf der Grundlage einer einzigen Drehung und auf den Projektionen eines Vektors auf den koordinierten Ebenen; daher intrinsisch stabiler. verschwindet auch das Problem der Kartierung der Trajektorie im Betriebsraum, den wir mit den Winkeln von Eulero hatten. eine Drehung um eine Achse wird nun in natürlichster Weise oder ebenso wie eine Drehung um diese Achse durchgeführt.
der einzige Nachteil dieser Darstellung ist neben dem der Kongruenzgleichung in mehr eine Mehrdeutigkeit. eine Tittendrehung um r, und eine von -teta um -r tatsächlich präzisieren. Es ist eine Mehrdeutigkeit, es muss verwaltet werden, aber viel besser als die Verwaltung von Singularitäten.




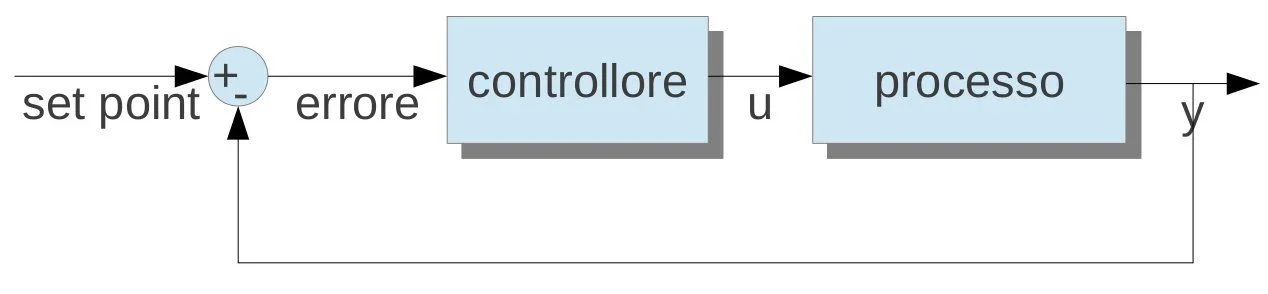
") möglichst nahe an die gewünschten oder an den Sollwert liegen.
möglichst nahe an die gewünschten oder an den Sollwert liegen.