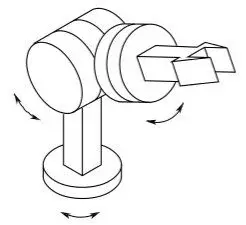
transducteursil existe différents types de transducteurs appliqués ou applicables au manipulateur. à l'université j'ai appris à faire une distinction entre les "capteurs", c'est-à-dire les éléments sensibles qui donnent la seule valeur vraie ou fausse, et les "transducteurs", c'est-à-dire les éléments sensibles qui fournissent une transduction sortante de la magnitude physique détectée dans une magnitude électrique. dans le monde réel cette distinction est faite très rarement et tend à parler génériquement de "capteurs" dans tous les cas. dans ce fil je voudrais maintenir la théorie qui voit les mots "capteur" et "transducteur" avec des significations différentes.
nous commençons à faire une distinction entre deux catégories. transducteurs
Je suis désolé. sont ceux qui servent à détecter l'état interne du manipulateur, tandis que les transducteurs
étrangères sont ceux nécessaires pour « sentir » le monde environnant, tout ce qui est extérieur au manipulateur.
entre transducteurs
Je suis désolé. trouver ce qui suit:
- oui.
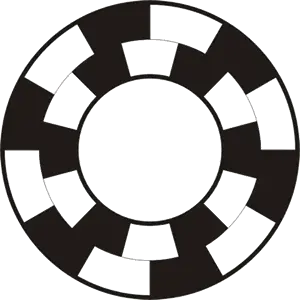
encodeur (voir
wiki) est utilisé sur l'axe des moteurs de joint pour connaître la position. pour obtenir plus de précision est évidemment monté sur l'axe rapide, celui du moteur. l'encodeur est un appareil numérique composé d'un disque avec des zones sombres et d'autres transparents. sur les côtés de ces zones il y a un illuminateur et un capteur optique, qui est éclairé par les zones transparentes et sombres. la sortie de l'encodeur est donc une onde carrée avec une fréquence proportionnelle à la vitesse de rotation du disque. pour connaître également la direction de rotation du disque vous pouvez penser à ajouter un second anneau, légèrement flou par rapport au premier. de la comparaison des deux vagues carrées il est donc possible de consocérer la direction de rotation en observant si le second signal est à l'avance ou tard par rapport au premier. en fait, ce concept est réalisé d'une manière légèrement différente, c'est-à-dire au lieu de rendre un second anneau flou par rapport au premier, vous n'installez qu'un deuxième capteur optique, flou par rapport au premier, qui lit ensuite le même anneau optique en avance ou en retard de la lumière.
pour observer un encodeur vous pouvez ouvrir n'importe quelle souris (beh...peut-être pas tout) avec roue. la roue est faite avec un encodeur.
qui vient de décrire est appelé "encodeur relatif" parce qu'il est capable de détecter des rotations à partir du point où il a été activé, mais pas la position d'angle absolu. pour réaliser un "encodeur absolu" vous pouvez utiliser un relatif et ajouter un cycle de machine zéro. le moteur est transporté dans une position connue et détectée par des capteurs externes, et à partir de là l'encodeur commence à mesurer. c'est le cas des photocopies. avoir une course sous vide n'est pas possible dans de nombreuses applications industrielles.
et possible ensuite utiliser un encodeur absolu. conceptuellement c'est très simple, l'encodeur a une série de anneaux, et un capteur pour chaque anneau. chaque angle est identifié par un suivi précis (radial) des zones sombres et claires. supposons alors avoir un transducteur à trois bits, avec trois anneaux; par exemple à 0° vous avez toutes les zones sombres, la sortie du capteur sera de 000. au 1er l'anneau intérieur découvre une zone transparente, la sortie sera 001. à la 2ème sera 010, à la 3ème 011 etc. c'est comme exprimer l'angle de code binaire. plus les bits sont, plus vous pouvez augmenter la résolution de l'angle.
le problème du codage binaire est que, en général, il peut arriver que entre un angle et les prochains bits se déplacent simultanément. comme les pistes du disque ne peuvent pas être parfaitement alignées, et qu'il n'est pas possible de synchroniser la lecture des bits avec le train d'impulsions provenant de l'encodeur, il pourrait arriver que les deux bits qui doivent changer simultanément, le fassent à une distance de temps telle que le signal soit acquis lorsque le premier a déjà commuté et le second pas encore. que la lecture intermédiaire est alors interprétée comme une position d'angle qui n'a rien à voir avec la vraie. pour surmonter ce problème, le codage binaire n'est pas utilisé, et le code dit gris est utilisé. ce code est construit avec quelques règles récurrentes (sur lesquelles je ne pense pas que l'affaire devrait descendre en détail :smile
")
qui ont un double avantage. le premier est que deux positions contiguës diffèrent seulement d'un peu, de sorte que le problème dit avant est dépassé. la seconde est qu'une opération xor entre le code instantané et sa propre copie traduite d'un bit renvoie le codage binaire, donc avec une opération mathématique simple au coût de calcul pratiquement zéro vous obtenez un code interprétable de n'importe quelle machine.
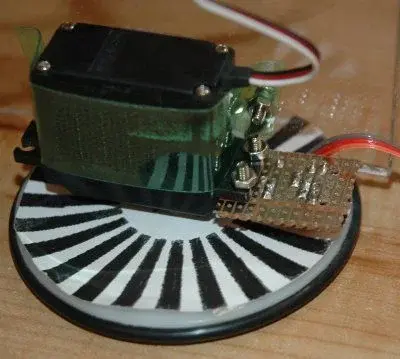
les encodeurs sont très compacts et robustes, ils sont fabriqués dans des boîtes scellées, de sorte qu'ils peuvent également être utilisés dans des applications sales. seulement deux petits problèmes.
le premier est dû à la nature numérique du transducteur. à basse vitesse perdent rapidement la précision parce que leur résolution est donnée par le nombre de secteurs, mais le nombre de secteurs dépend de leur taille. en fait, parce que les zones ne sont pas trop petites, pour augmenter le nombre de secteurs, il est nécessaire d'augmenter le diamètre de la roue. cependant, n'oublions pas que le rapport de réduction typique pour les articulations des robots est de 1:100, il est donc très rare que l'axe rapide soit suffisamment lent pour éprouver la granulosité d'un encodeur.
un deuxième problème est le coût de réalisation de la roue, qui pour l'encodeur absolu a besoin de traitement de haut.
")